

Silicone Bionic Fingertip Touch-Pressure Sensitive Device
A kind of sensitive device, silicone technology, applied in the field of bionic sensitive perception, can solve the problems of poor anti-interference ability, weak output signal, unable to use measurement, etc., to achieve good resilience, ensure resolution and accuracy, and improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, but the present invention is not limited to these embodiments.
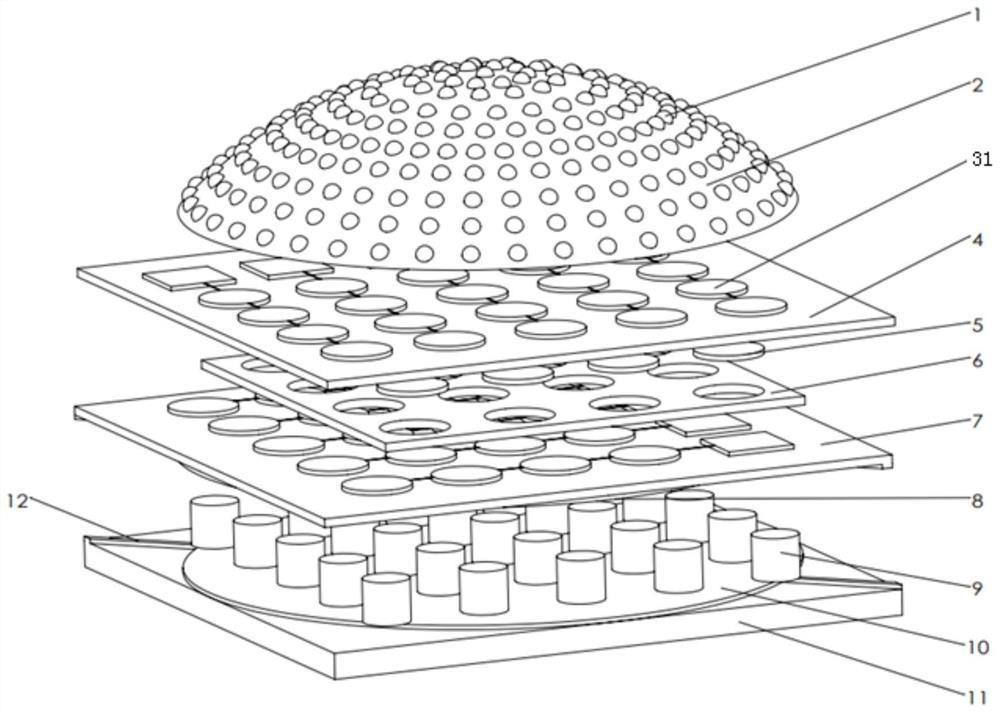
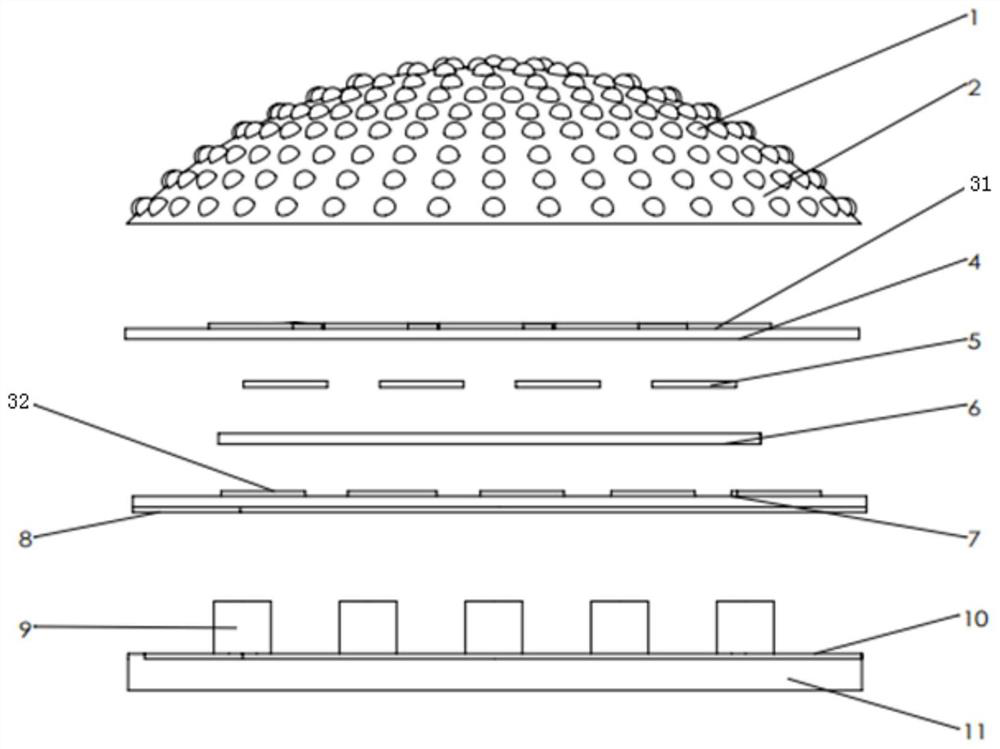
[0029] Such as Figure 1 to Figure 5 As shown, the silicone bionic fingertip touch-pressure sensitive device includes a silicone upper substrate 2 , a sensitive array mechanism, a sensing electrode mechanism and a silicone lower substrate 11 arranged in sequence from top to bottom.
[0030] The silica gel upper base 2 bionics the human fingertip and is in the shape of a flat hemisphere. Several stress-sensing protrusions 1 are arranged on the surface of the silicone upper substrate 2, and the stress-sensing protrusions 1 are used to sense external forces and transmit the sensed external forces to the sensitive array mechanism and the sensing electrode mechanism.
[0031] The sensitive array mechanism includes an upper sensing unit 31 , an upper electrode array 4 , a plura...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More