

Grabbing mechanical arm
A technology of a robotic arm and a grasping device, applied in the field of machinery, can solve the problems of inaccurate positioning of grasping workpieces, increase the grasping force of the clamping arm, and reduce the grasping efficiency, so as to solve the inaccurate positioning and increase the grasping force. , the effect of improving convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
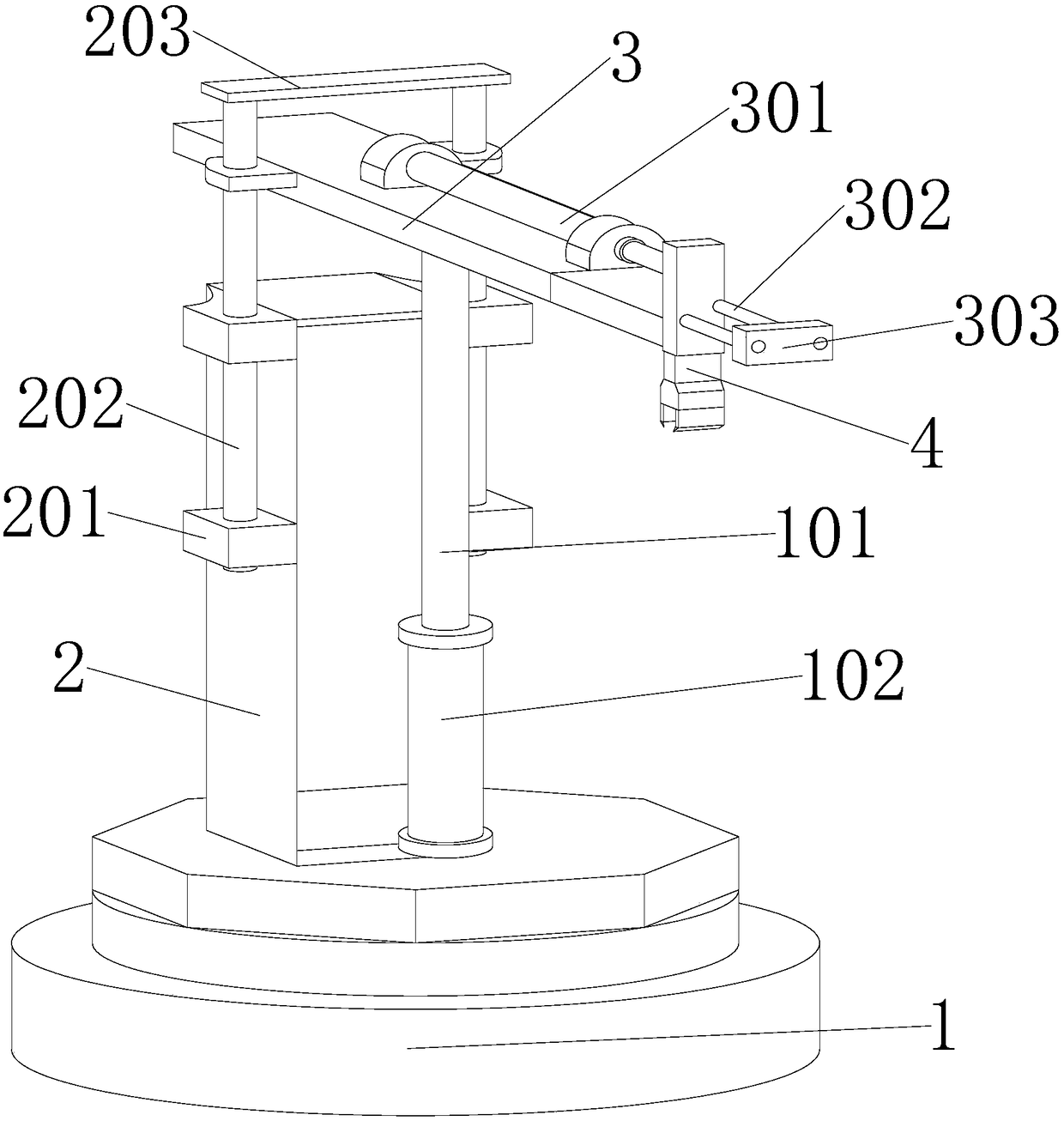
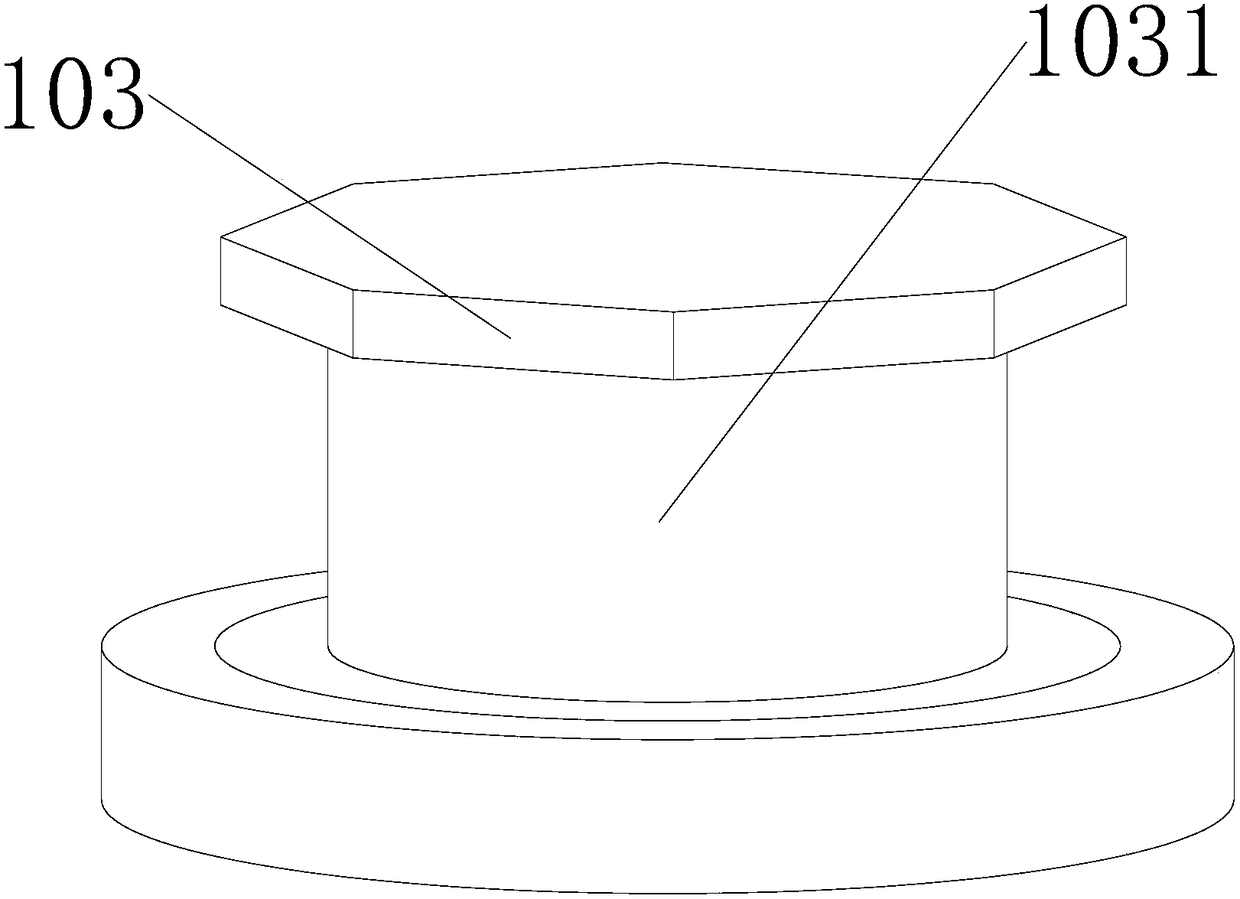
[0024] see Figure 1-4 , the present invention provides a technical solution: a grasping mechanical arm, including a base 1, a support frame 2, a grasping device 4 and a force spring 404, the upper part of the base 1 is closely attached to a rotating tray 103, and the rotating tray 103 can make the support frame 2 rotate in the horizontal direction, thereby achieving the effect of grabbing at multiple angles, thereby avoiding the repeated movement of the base ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More