

A High Dynamic Carrier Phase Tracking Method of Pseudo-code Modulated CW Radar Echo
A technology for modulating continuous wave and radar echo, applied to radio wave measurement systems, instruments, etc., can solve problems such as large transient errors, inability to solve high-dynamic carrier phase precision tracking, and carrier phase tracking performance degradation, so as to avoid filtering The effect of value discontinuity, good dynamic tracking ability, and good tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
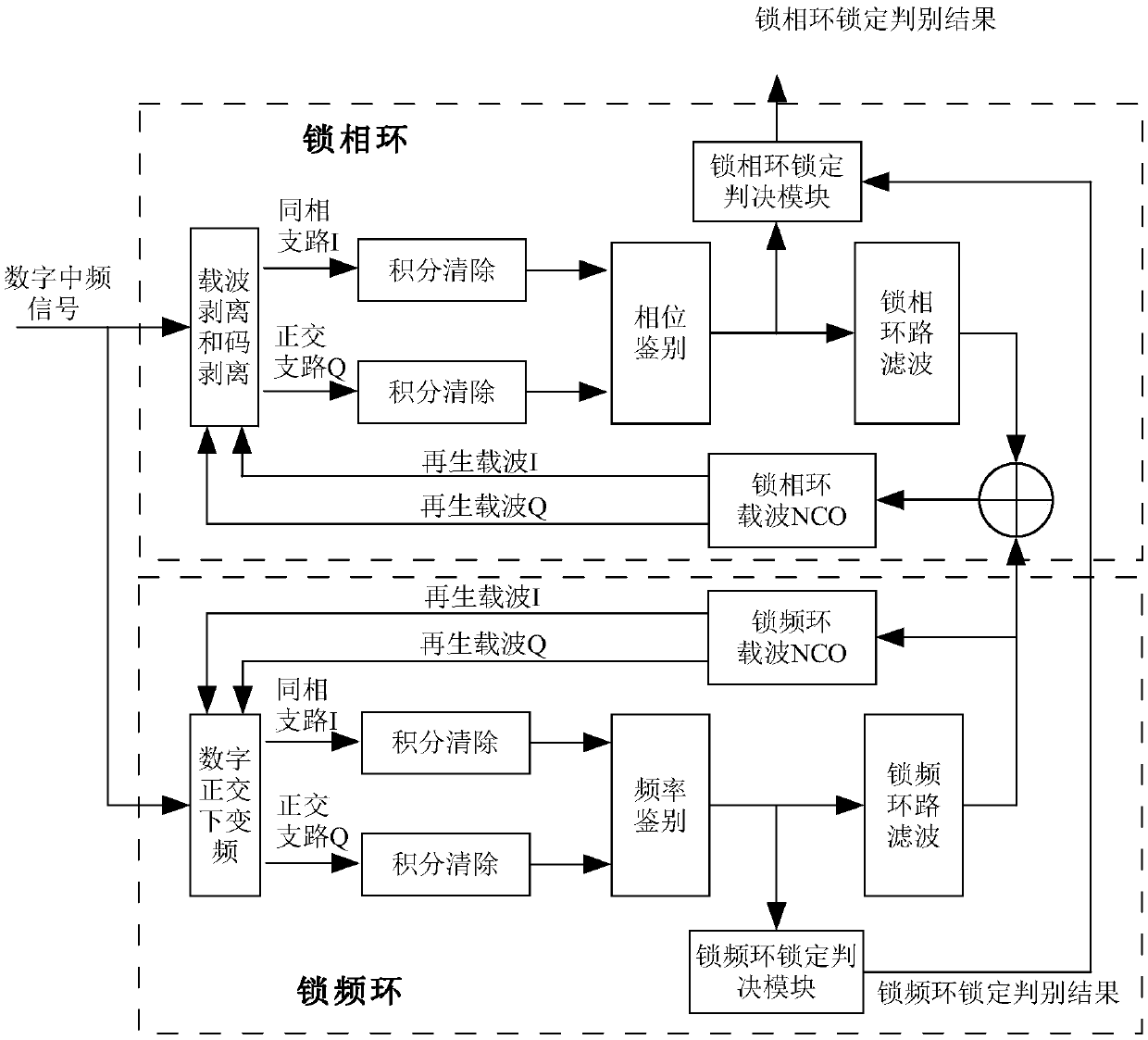
[0030] The pseudo code modulation continuous wave radar echo high dynamic carrier phase tracking method provided by the present invention adopts a frequency-locked loop in parallel with a phase-locked loop, such as figure 1 As shown, the frequency locked loop is used to track the carrier frequency of the echo digital intermediate frequency signal of the pseudo code modulated continuous wave radar, and the phase locked loop is used to perform carrier phase tracking of the echo digital intermediate frequency signal of the pseudo code modulated continuous wave radar;
[0031] The frequency-locked loop performs the following steps:
[0032] 1) Obtain the predicted Doppler frequency, perform digital quadrature down-conversion processing and integral clearing processing on the echo digital intermediate frequency signal of the pseudo-code modulated continuous wave radar, and obtain the frequency-locked loop integral clearing result;
[0033] I(k)≈A·R[Δτ(k)]·sinc[Δω d (k)·N / 2]cosθ k...
Embodiment 2
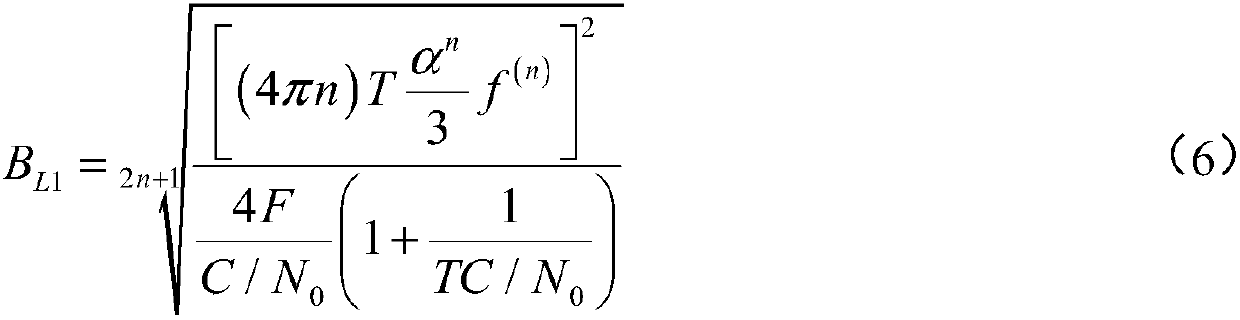
[0082] In this embodiment, consider that the pseudo-code modulation continuous wave radar echo IF carrier frequency is 16.384MHz, the pseudo-code rate is 8Mbps, the pseudo-code period is 8191, and the sampling frequency f s =1 / T s =65.536MHz, carrier-to-noise ratio C / N 0 = 38dBHz. Echo Doppler frequency is 10.25kHz, Doppler frequency prediction error Δf d =250Hz, the first derivative of Doppler frequency to time caused by acceleration stress f (1) =500Hz / s, the second derivative of Doppler frequency to time caused by jerk stress f (2) =9.8Hz / s 2 .
[0083] 1) The frequency-locked loop uses the predicted Doppler frequency to perform digital quadrature down-conversion and integral clearing on the digital intermediate frequency signal of the pseudo-code modulated continuous wave radar echo. The integral clearing period is T=N T s =1ms, get the integration clearing result:
[0084] I(k)≈A·R[Δτ(k)]·sinc[Δω d (k)·N / 2]cosθ k ,k=1,2,...,(11)
[0085] Q(k)≈A·R[Δτ(k)]·sinc[Δω ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More