

Land-air amphibious all-directional robot
A robot, land-air technology, applied in the field of unmanned aerial vehicles, can solve the problems of increasing the self-weight of the robot, the low precision of the robot movement, and the inability to achieve omnidirectional movement, and achieve the effect of precise movement displacement and control movement displacement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
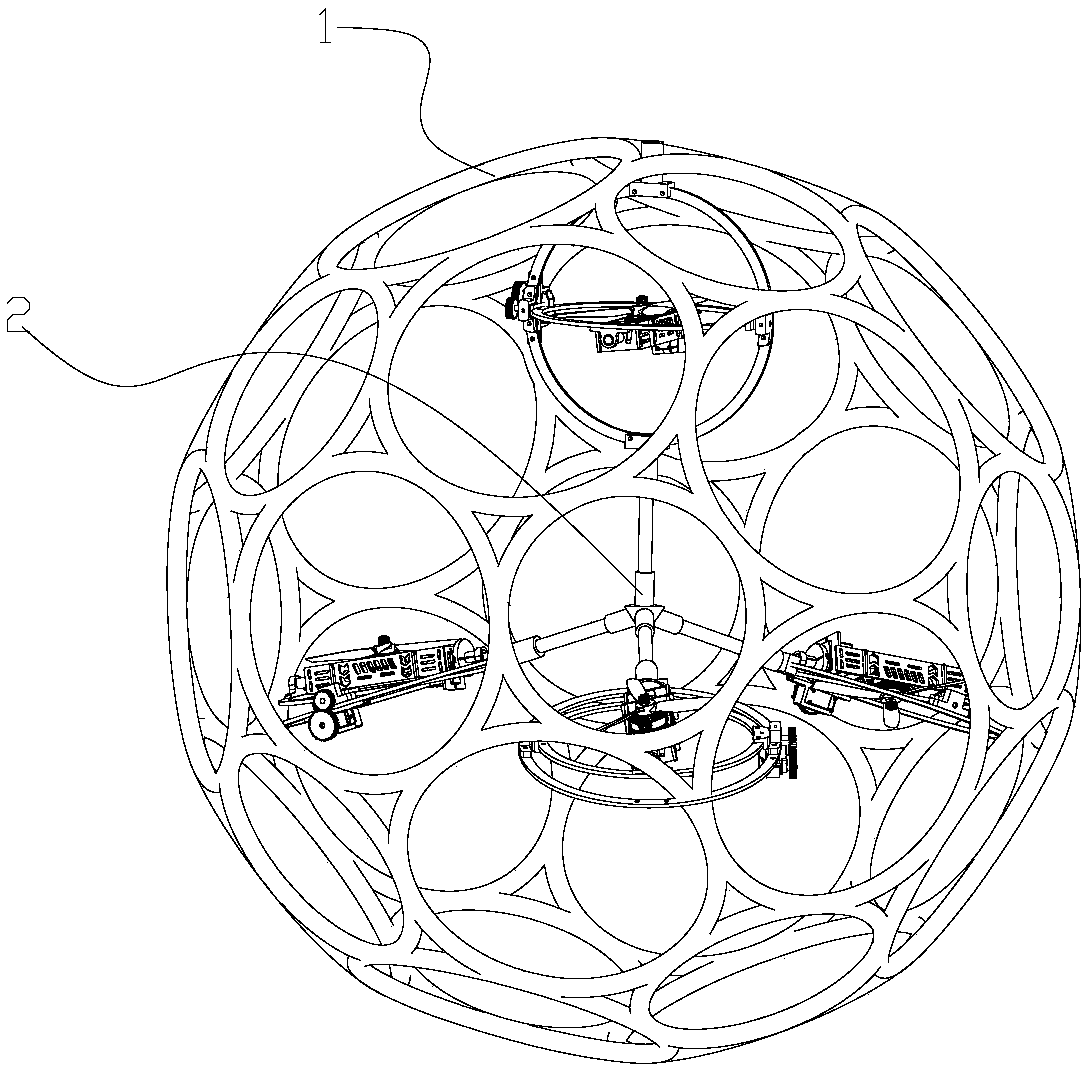
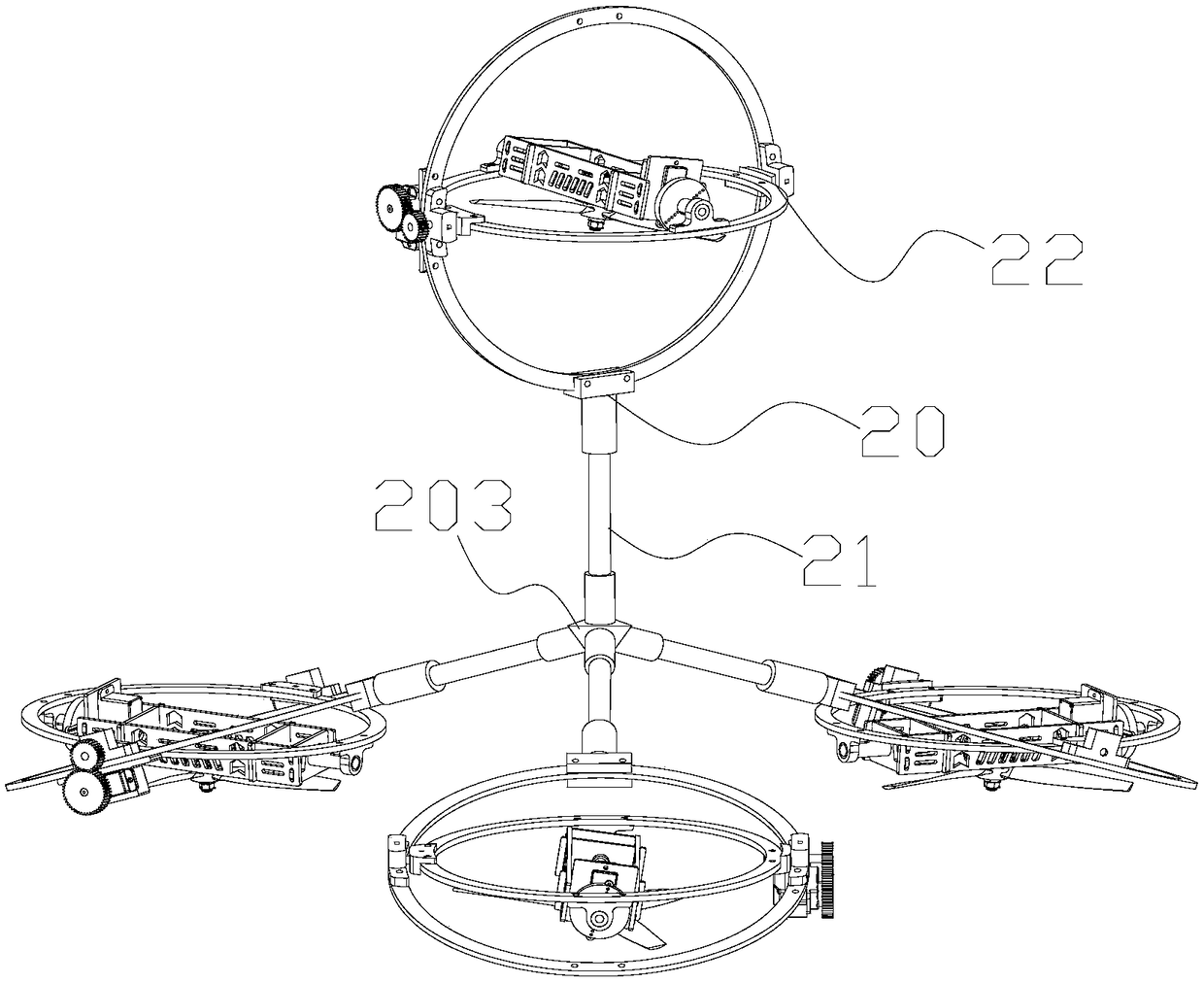
[0025] The land-air amphibious omnidirectional robot comprises a casing 1 and an omnidirectional aircraft 2 arranged in the casing 1 . The housing 1 provides a protective support base for the omnidirectional aircraft 2 to move on the ground. It can be a spherical structure, a polyhedron structure or a rod splicing structure. In order to facilitate relative movement with the ground, the housing 1 is preferably a spherical structure. The omnidirectional aircraft 2 is the core component of the robot, which is inscribed on the inner wall of the shell and distributed in a rhombus shape as a whole, providing power and effective control for the robot's flight movement. The omnidirectional movement of the robot as a whole an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More