

Cooperative control method for full-state constraint mechanical arm trajectory tracking
A collaborative control and trajectory tracking technology, applied in the field of control, can solve problems such as poor steady-state performance and low tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be described in further detail below in conjunction with the accompanying drawings.
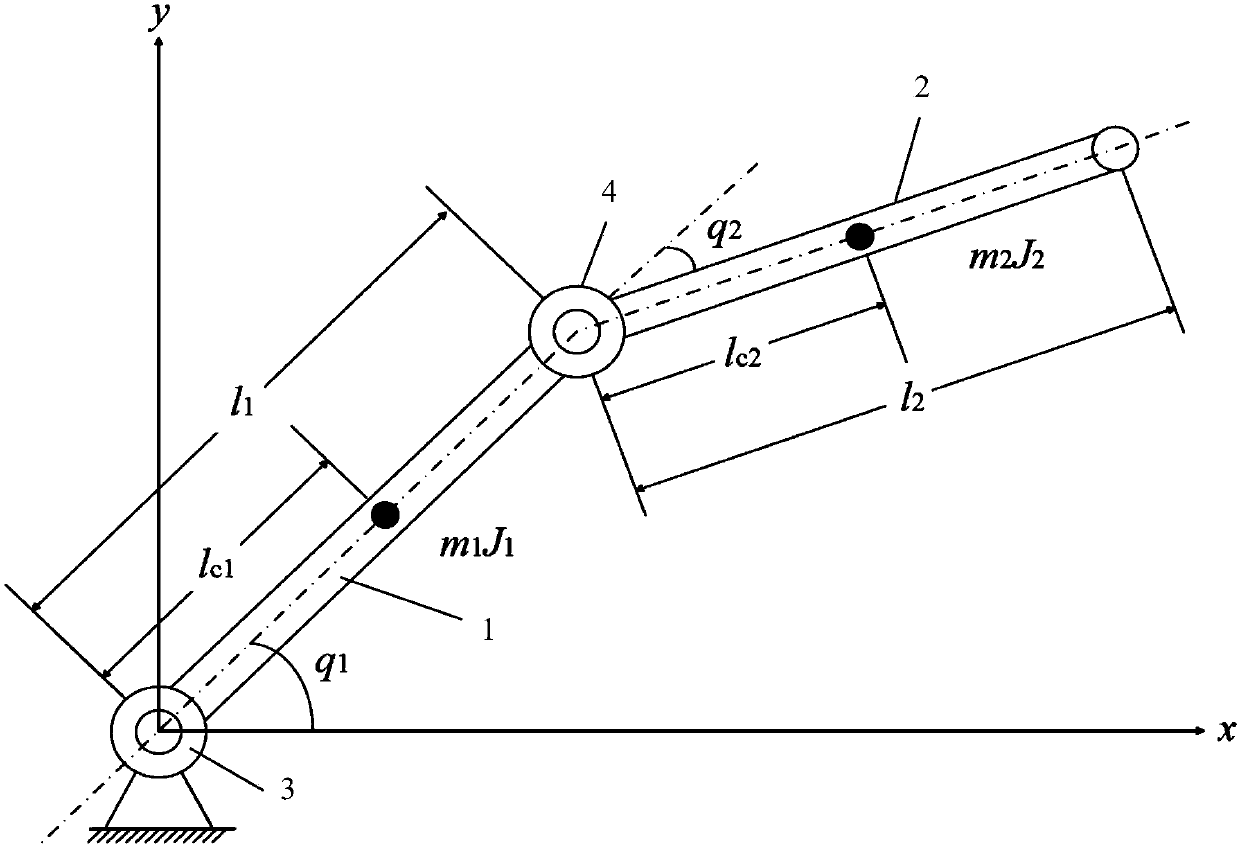
[0088] Take a robotic arm with joint constraint number n=2 as an example, such as figure 1 As shown, the mechanical arm includes two links: a first link 1 , a second link 2 , and two constraint joints: a first joint 3 and a second joint 4 . The mass and length of the first connecting rod 1 are respectively m 1 , l 1 , the mass and length of the second connecting rod 2 are m 2 , l 2 ; The distance from the first joint 3 to the center of gravity of the first link 1 is l c1 , the distance from the second joint 4 to the center of gravity of the second link 2 is l c2 ; The moments of inertia of the first connecting rod 1 and the second connecting rod 2 are respectively J 1 、J 2 ;q 1 is the angular position of the first link 1, q 2 is the angular position of the second link 2. The counterclockwise direction is specified as the forward rotation direction o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More