Mechanical arm of robot
A mechanical arm and robot technology, applied in the field of robots, can solve the problems of low positioning accuracy, large space occupation, poor rigidity, etc., and achieve the effect of reliable performance and improved accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be clearly and completely described below through specific embodiments.
[0021] A mechanical arm of a robot comprises a connecting rod arm, a grasping device, and a joint device. The connecting rod arm is connected with the grasping device, and the grasping device is internally provided with a joint device.
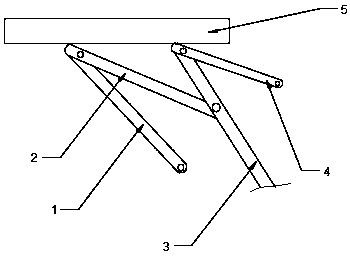
[0022] Such as figure 1 As shown, the connecting rod arm is composed of a four-link structure, and a four-link structure is hinged on the frame. The four-link structure includes an active rod 1, a first connecting rod 2, a second connecting rod 3, a driven rod 4, Arm board 5. The active rod 1 is connected to the servo motor and driven by the servo motor. The active rod 1 is hingedly connected to one end of the first connecting rod 2, and the other end of the first connecting rod 2 is hingedly connected to the second connecting rod 3. One end is fixed on the frame, the other end of the second connecting rod 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More