

Multi-line laser radar-based 2D data processing method for 3D point clouds
A multi-line laser and point cloud data technology, which is applied in image data processing, instruments, calculations, etc., can solve the problems of large data volume and incomplete information of 2D methods, and achieve the effect of reducing the amount of resulting data and avoiding a large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention are described below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of this technical solution, and detailed implementation methods and processes are provided, but the protection scope of the present invention is not limited to the following embodiments. Figure 2 to Figure 5 , the five-pointed star represents the position of the 16-line lidar, Figure 6 The five-pointed star in the middle represents the position of the single-line lidar.
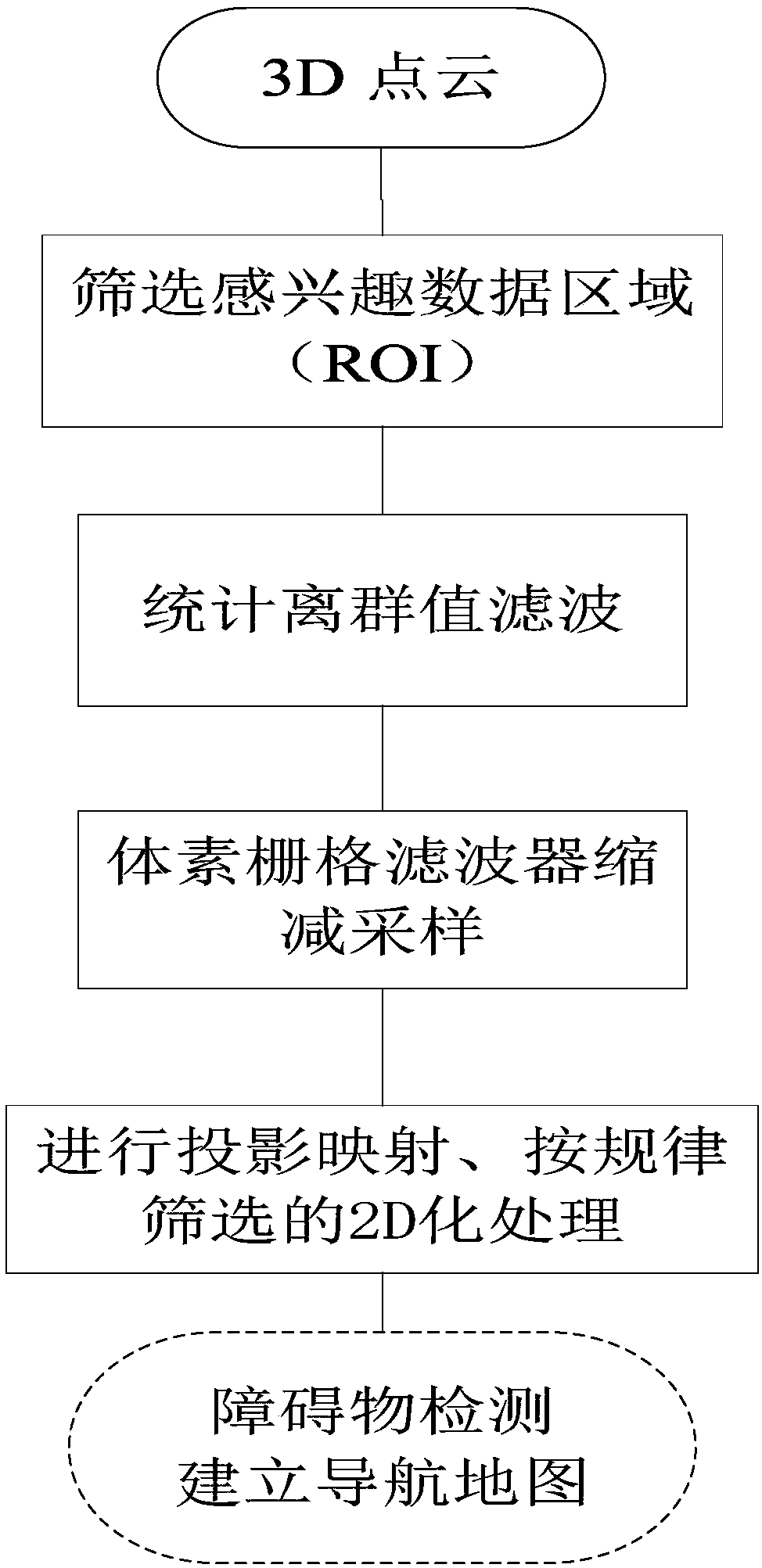
[0023] In this embodiment, a 16-line laser radar is taken as an example, figure 2 An example of 3D original point cloud is given. The scene is that the lidar is at a height of 1.2 meters from the ground, and the collected results are placed horizontally. Eliminate the processing, the result is as follows image 3 As shown; the downsampling part receives the filtered point cloud data, uses the voxel raster filter to downsample, and the result is as fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More