

A Parameter Estimation Method Based on Undersampling Phase-encoded Signal
A phase encoding signal and parameter estimation technology, which is applied in the field of parameter estimation of phase encoding signals, can solve the problem of high sampling rate and achieve the effect of reducing pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0035] Specific embodiment one: a kind of parameter estimation method based on the undersampled phase encoding signal comprises the following steps:
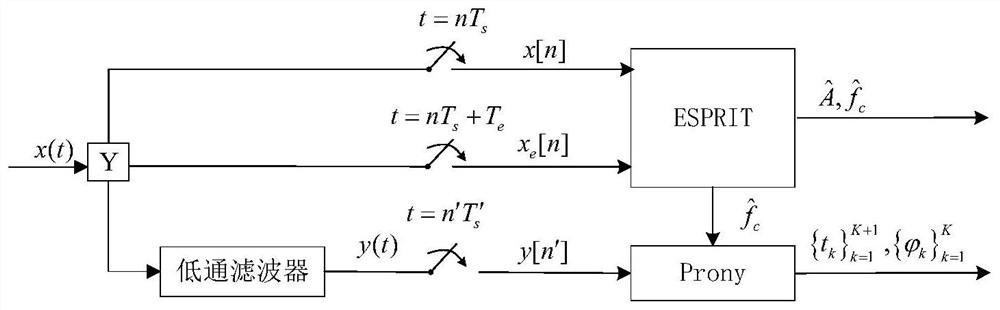
[0036] Aiming at the parameter estimation problem of MPSK signal, the present invention proposes an under-sampling method based on multi-channel parallel structure. There are three channels in this structure; channel 1 and channel 2 perform dual-channel delay sampling on the signal, and use the rotating subspace invariant (ESPRIT) algorithm to estimate the signal carrier frequency. Channel three first performs low-pass filtering on the signal, and then samples at a low speed to obtain a continuous Fourier series coefficient at the low frequency of the signal; combined with the carrier frequency estimated by channel one and channel two, the Prony algorithm is used to estimate the signal The amplitude, discontinuity point, and phase information of the signal. The specific structure diagram is as figure 1 shown.
[0037] Step 1:...
specific Embodiment approach 2
[0042] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the expression of the phase encoding signal x(t) in the step one is:
[0043]
[0044] Where t is time, A is signal amplitude, f c is the signal carrier frequency, τ is the signal duration, and K is the number of segments separated by the signal due to phase jumps; is the phase of each segment, is the initial phase, c(k) is the value of the input symbol, and the possible values are M is the base number of phase modulation, q is an intermediate variable, ξ k (t) is an intermediate variable, ξ k (t)=u(t-t k )-u(t-t k+1 ), 0≤t 1 K+1 k is the position of the discontinuity point caused by the phase mutation.
[0045] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0046] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: x[n] and x in the second step e The expression of [n] is:
[0047]
[0048]
[0049] Where n is a discrete count value.
[0050] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More