

Robot target part saliency detecting method based on vision
A technology for target parts and detection methods, applied in computer parts, instruments, manipulators, etc., can solve problems such as inability to complete tasks, and achieve the effect of complete background removal, clear effect edges, and complete target shape segmentation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
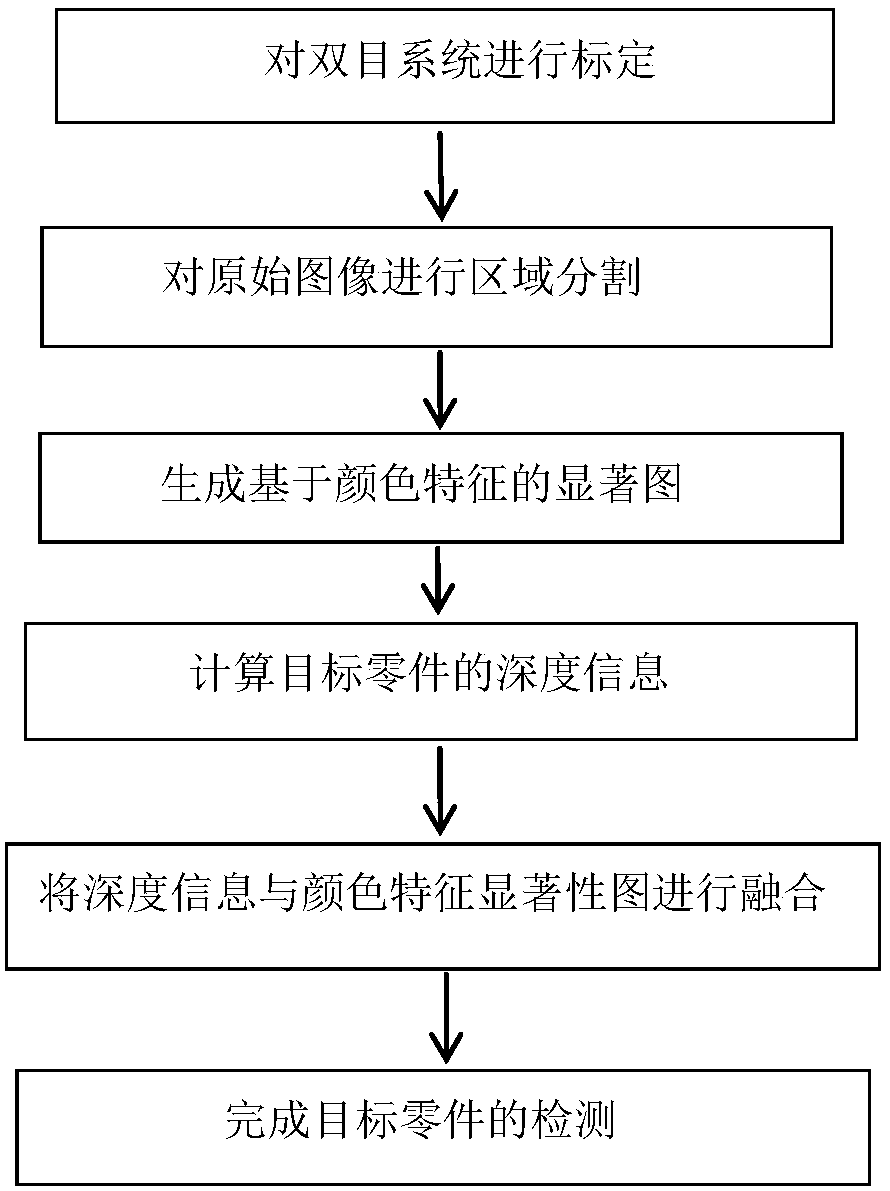
Method used
Image



Examples
Embodiment Construction
[0041] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0042] Some of the existing detection methods for target parts only consider the characteristics of the image itself to find the difference between the target area and the background area of the image, so as to distinguish the target position from the background area. In addition, the Markov chain is used to process the saliency map, and the mutual influence relationship between the central saliency area and the surrounding background area is found. There is also a method of using the convolution of the magnitude spectrum and the filter to realize redundant information and finally find the salient area of the target part. Although these methods have certain effects in detecting the salience of target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More