

Robot with precise zeroing function, zeroing method, system and medium
A robot, zero position technology, applied in the field of robotics, can solve the problems of inaccurate zero position of 100 robots, inability to grasp objects well, and deviation of motion data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
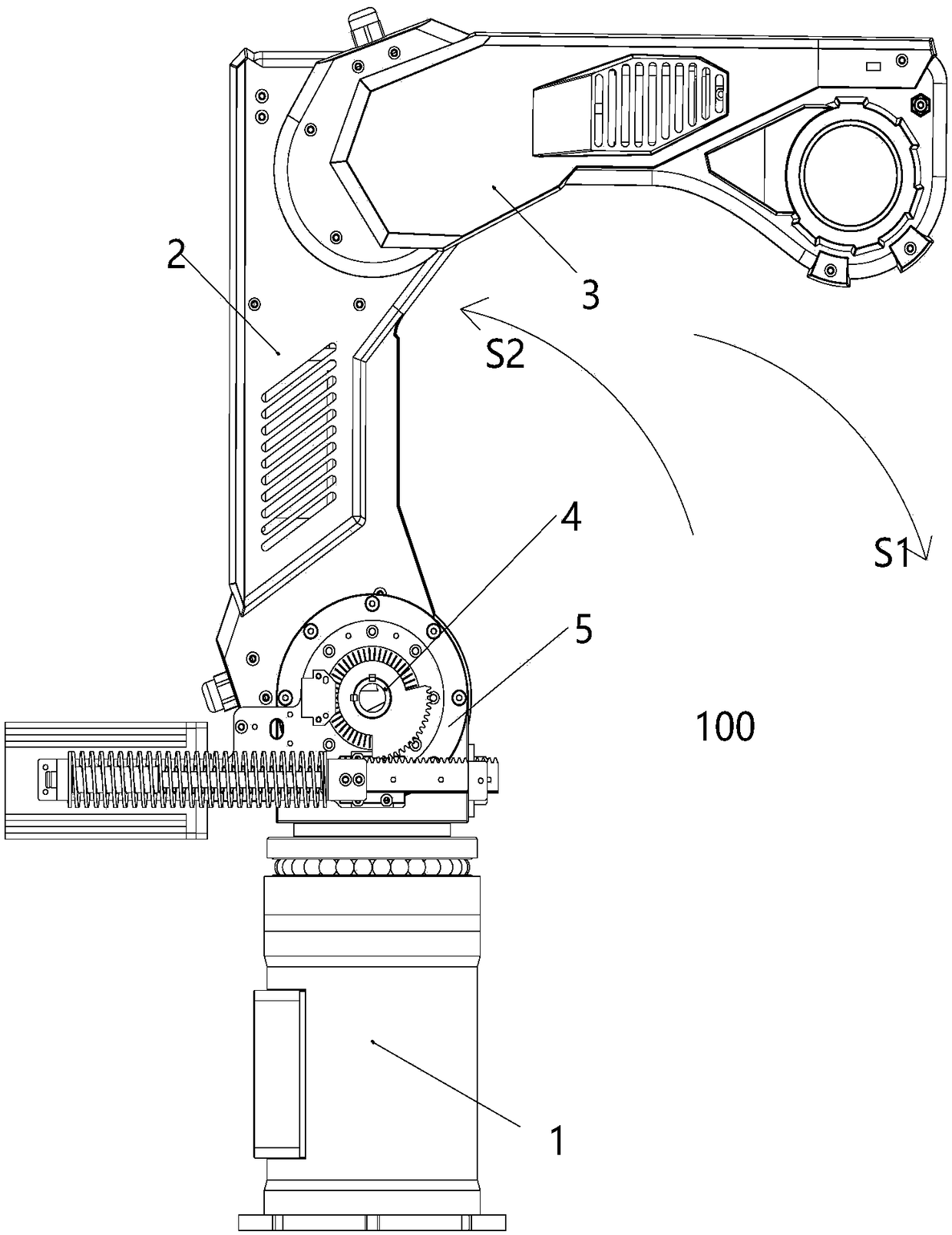
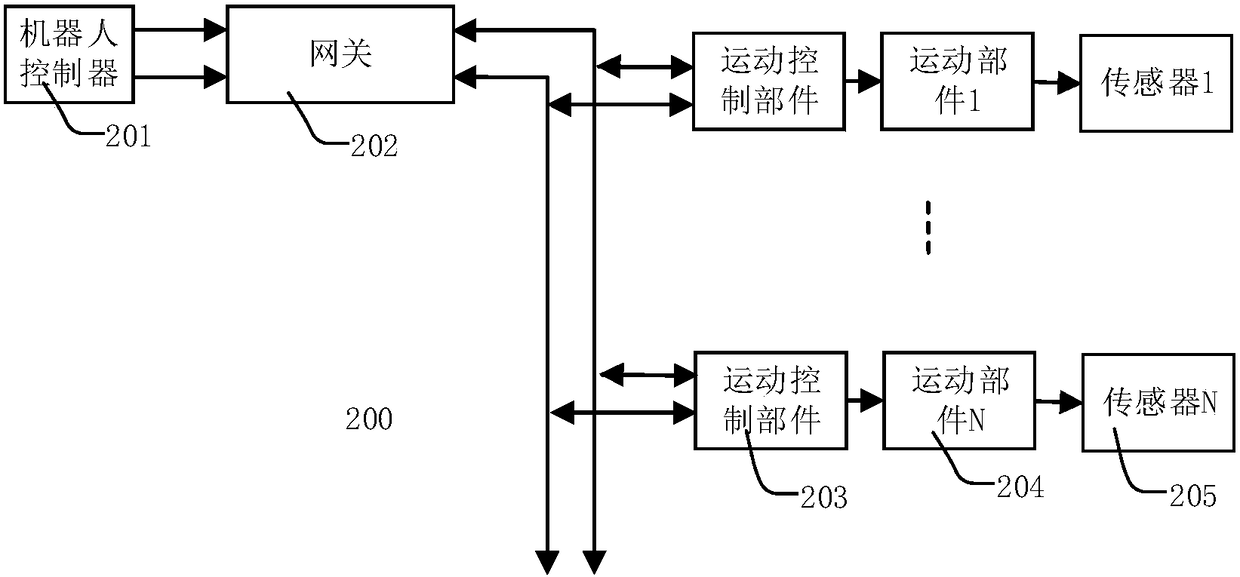
[0088] As a specific example, with reference to the attached figure 1 And attached figure 2 , with figure 1 Shows the structure of a multi-joint robot 100, with figure 2 The principle of a motion control system 200 is shown. In this embodiment, the motion control system 200 includes a multi-joint robot 100. The motion control system 200 specifically includes a robot controller 201, a gateway 202, a motion control component 203, and a motion component 204. The moving parts 204 such as the position detection sensor 205 are the motors in the robot 100. The robot 100 is a four-joint robot. The four joints and the end effector can be driven by five motors respectively. Then the moving parts in the motion control system 200 The num...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More