

Multi-cleaning robot task assignment method in large-scale indoor environment
A technology for cleaning robots and indoor environments, applied in the field of multi-robot task assignment, can solve problems such as difficult cleaning work, waste of resources, and limited battery power for cleaning robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing and preferred embodiment, the present invention is described in detail as follows:
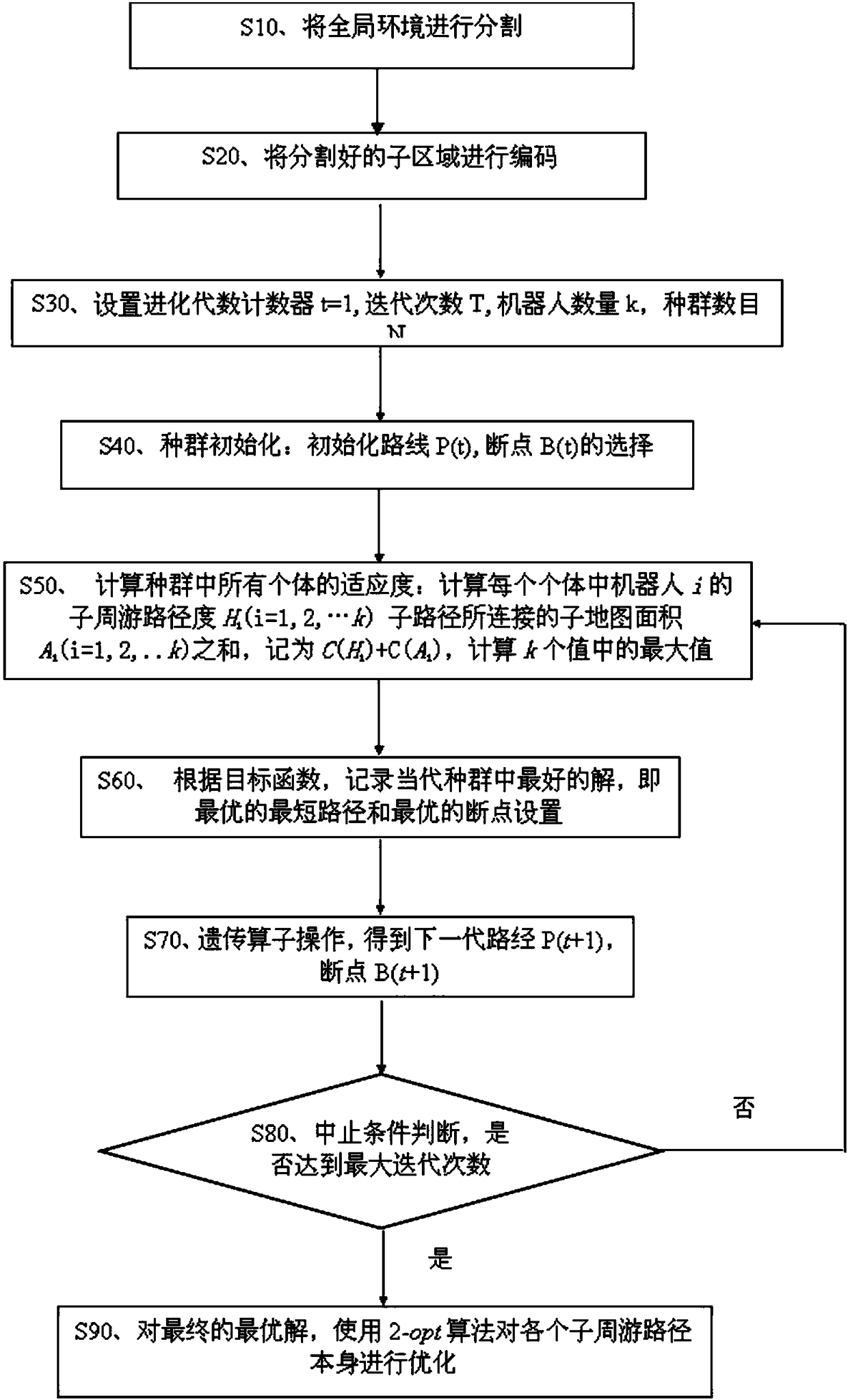
[0038] Such as figure 1 As shown, the present invention provides a multi-cleaning robot task assignment method in a large-scale indoor environment, which includes the following steps:
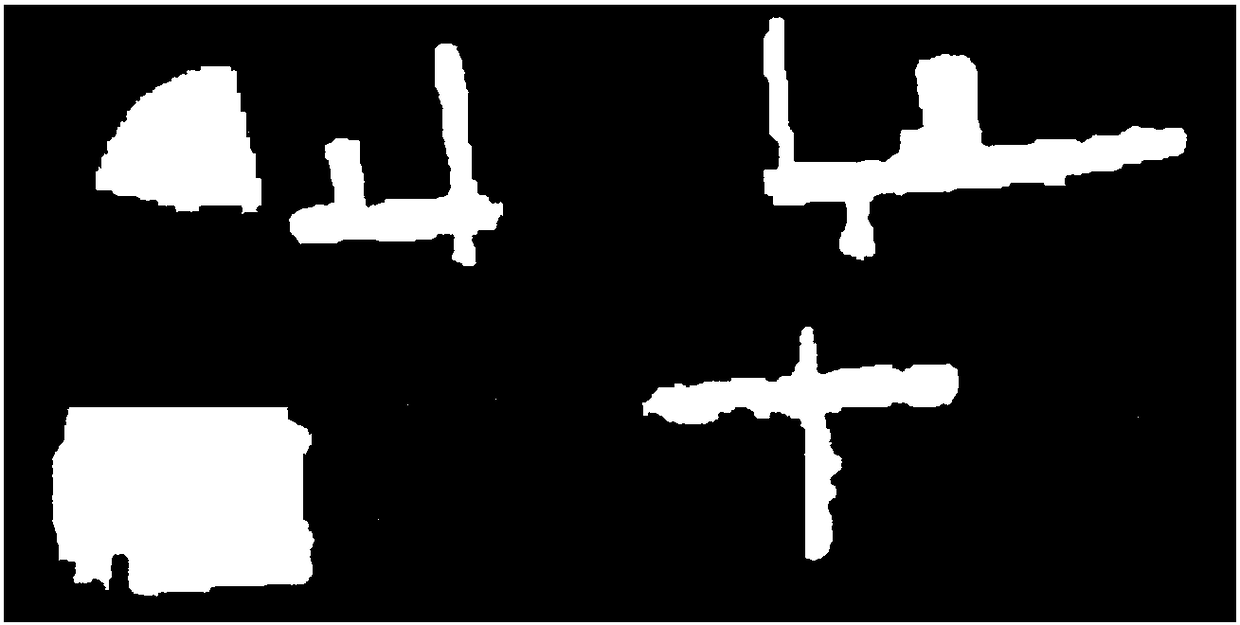
[0039] S10, dividing the global environment;
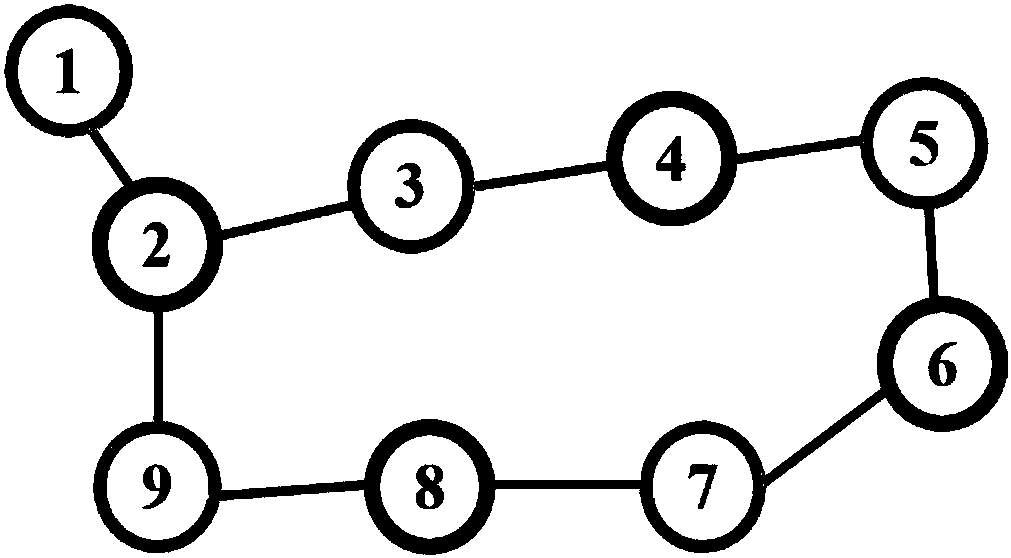
[0040] S20. Encoding the divided sub-regions;
[0041] S30. Set the evolution algebra counter t=1, the number of iterations T, the number k of robots, and the number N of populations;
[0042] S40, population initialization: initialization route P(t), selection of breakpoint B(t);
[0043] S50. Calculate the fitness of all individuals in the population: calculate the sub-travel path H of robot i in each individual i (i=1, 2,...k) the sub-map area A connected by the sub-path i (i=1, 2, ..k) sum, denoted as C(H i )+C(A i ), calculate the maximum value among k values;
[0044] S60. According to the objectiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More