

Disturbance-observer-based multi-mobile-robot formation robust control method
A technology of mobile robots and disturbance observers, which can be used in adaptive control, general control systems, control/regulation systems, etc., and can solve the problems of less research on system dynamics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
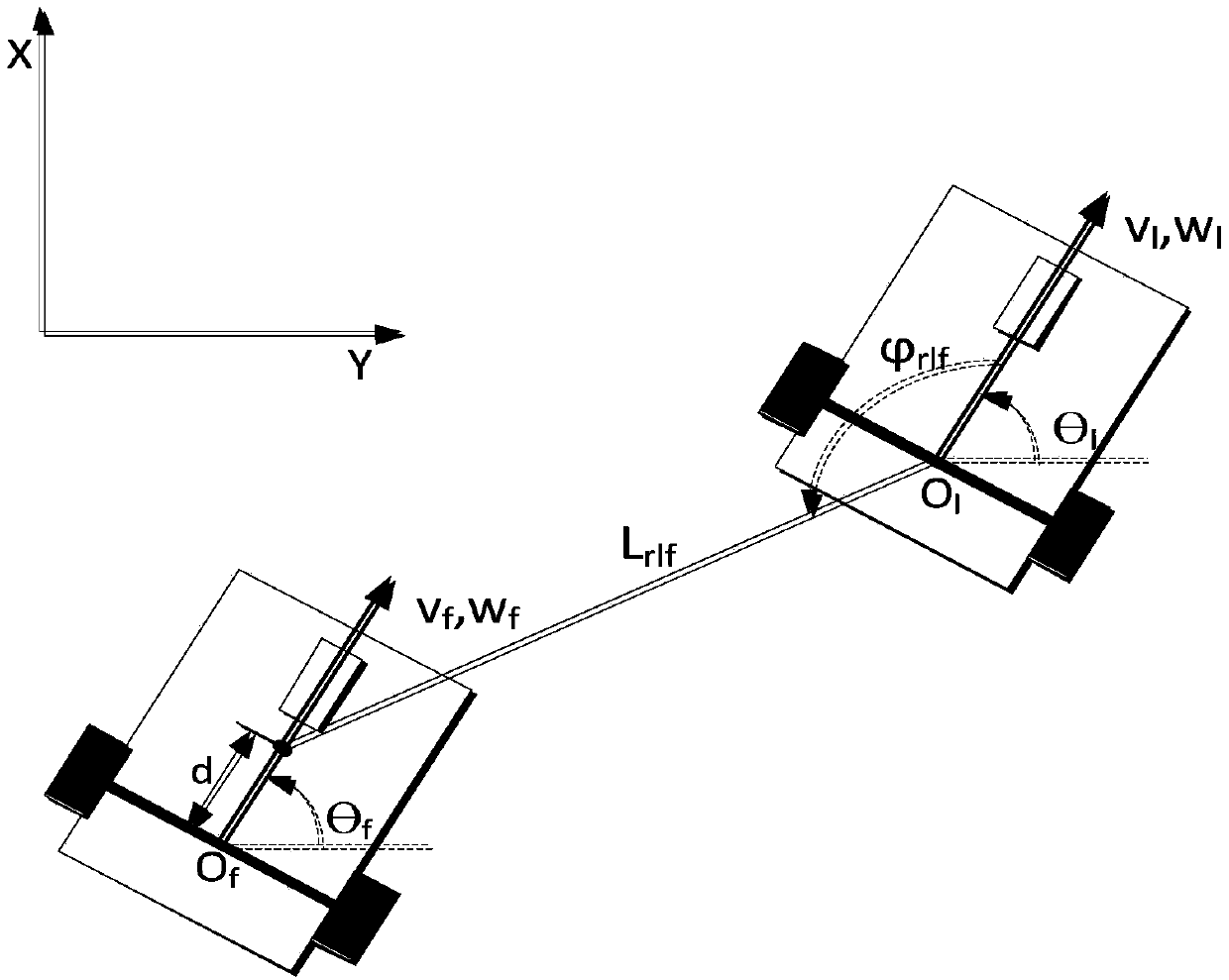
[0084] Such as figure 1 As shown, a robust control method for multi-mobile robot formation based on disturbance observer, including the following steps:
[0085] (1) Establish a multi-mobile robot formation control system model considering the influence of uncertain factors including model parameter perturbation and external disturbance. The specific process is as follows:
[0086] (1.1), the moment required for the forward and rotational motion of the mobile robot is provided by the two drive wheels installed on the same shaft, and the front wheel only plays a supporting role. The kinematic equation of the mobile robot can be described as:
[0087]
[0088] In formula (1), x, y and θ are the coordinates and orientation angle of the mobile robot in the global coordinate system, respectively, and the orientation angle is set to be positive in the cou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More