

Supporting type plane-position follow-up tracking system based on series double-rod mechanism and with low disturbing force
A dual-rod mechanism, plane position technology, applied in the field of follow-up tracking system, low-interference force-supported plane position follow-up tracking system, can solve problems such as large motion error, achieve rich means, ensure accuracy and referability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
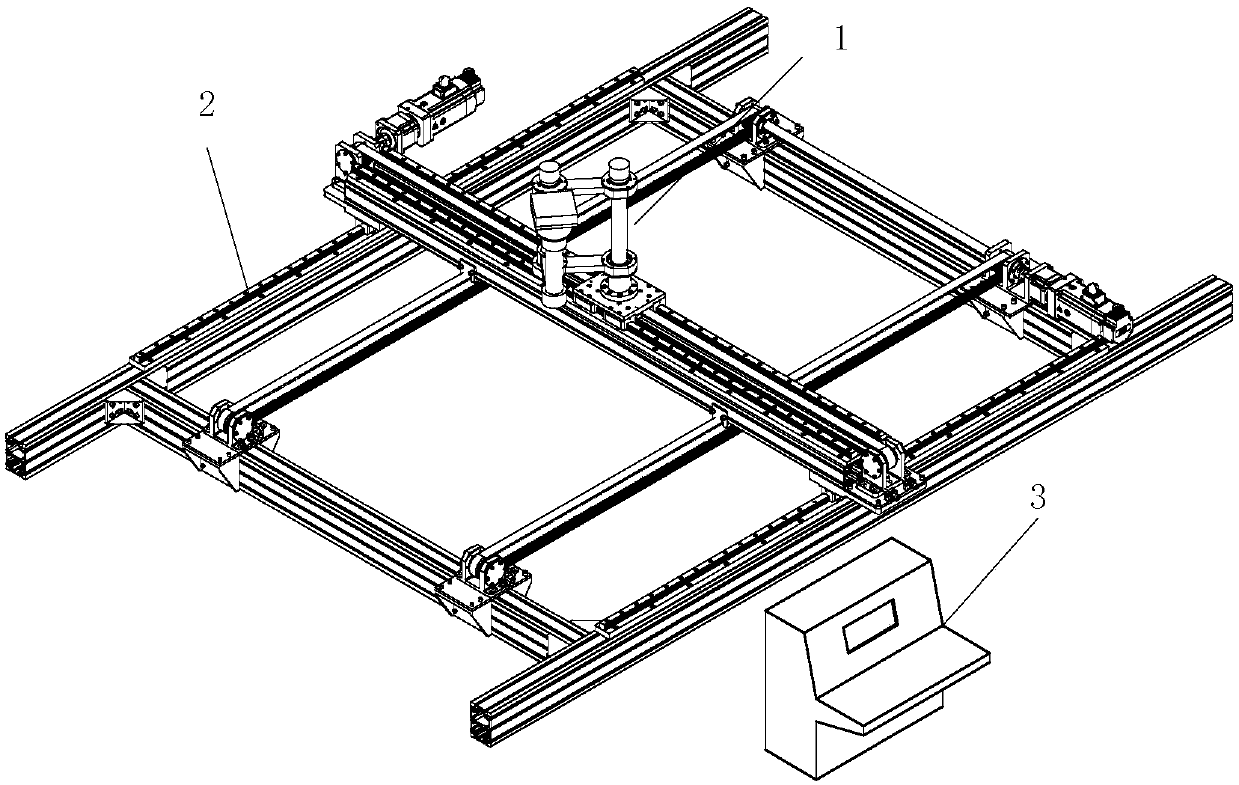
[0013] Specific implementation mode one: combine Figure 1 to Figure 3 Describe this embodiment, the low-interference support type plane position follow-up tracking system based on the series double-rod mechanism described in this embodiment includes a series double-rod mechanism 1, a two-dimensional motion platform 2, a control system 3, a first encoder 17, The second encoder 18 and the horizontal two-dimensional force sensor 19, the series double-bar mechanism 1 is installed on the two-dimensional motion platform 2, the first encoder 17, the second encoder 18 and the horizontal two-dimensional force sensor 19 are installed on the series double-bar On the mechanism 1, the control system 3 is connected to the first encoder 17, the second encoder 18, and the force level two-dimensional force sensor 19 on the series double-bar mechanism 1 through cables.
specific Embodiment approach 2
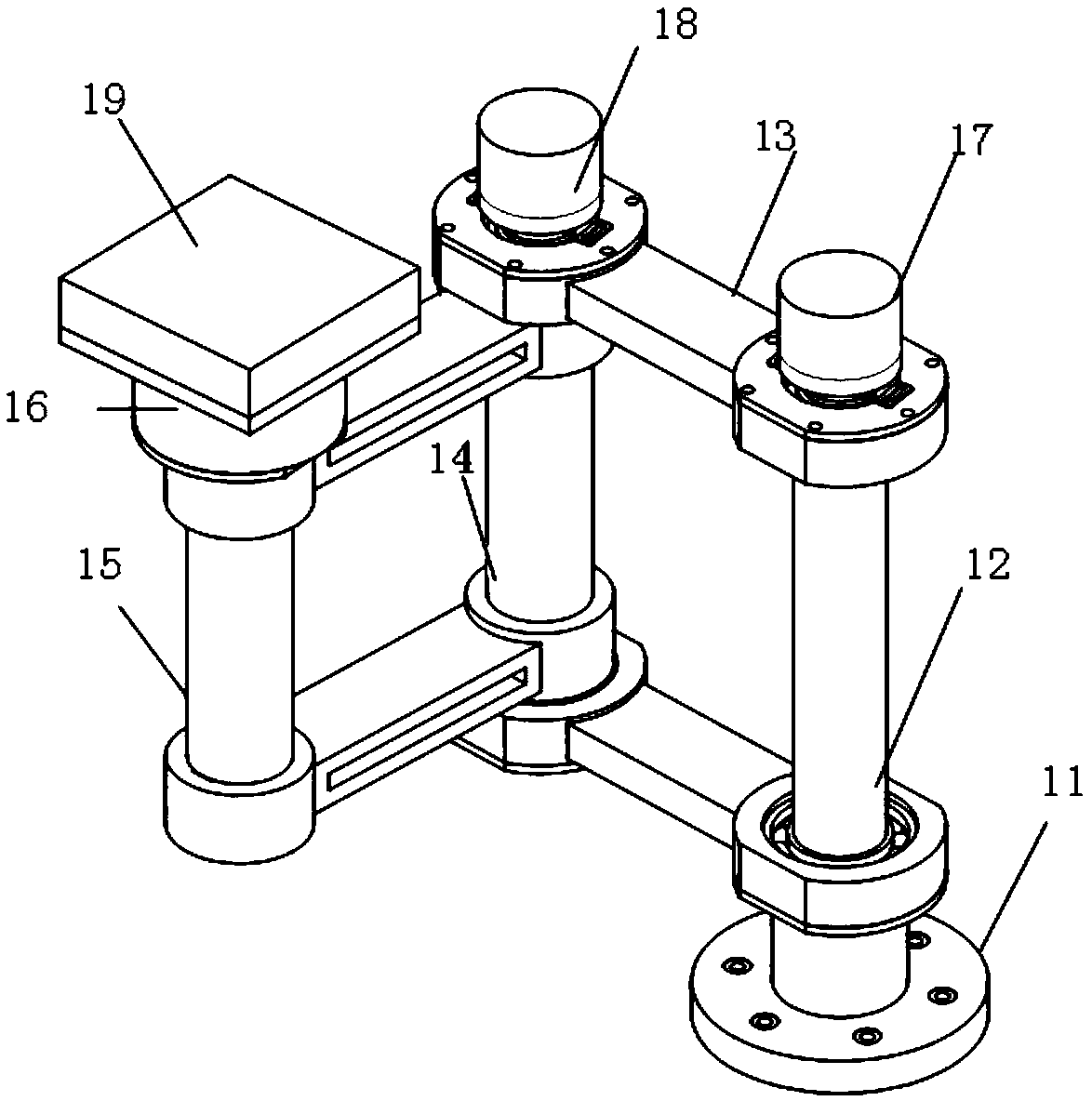
[0014] Specific implementation mode two: combination Figure 1 to Figure 3 Describe this embodiment, the series double-bar mechanism 1 of the low-interference support type plane position follow-up tracking system based on the series double-bar mechanism in this embodiment includes a root flange 11, a root shaft 12, four connecting rods 13, a middle The shaft 14, the outer shaft 15 and the outer shaft joint 16, the root shaft 12, the middle shaft 14, and the outer shaft 15 are arranged in a triangle, the root shaft 12 is connected with the middle shaft 14 through two connecting rods 13 arranged side by side from top to bottom, and the outer The shaft 15 is connected to the central shaft 14 through two connecting rods 13 arranged side by side from top to bottom, the lower end of the root shaft 12 is connected to the root flange 11 , and the upper end of the outer shaft 15 is connected to the outer shaft joint 16 . The first encoder 17 is installed on the upper end of the root sh...
specific Embodiment approach 3
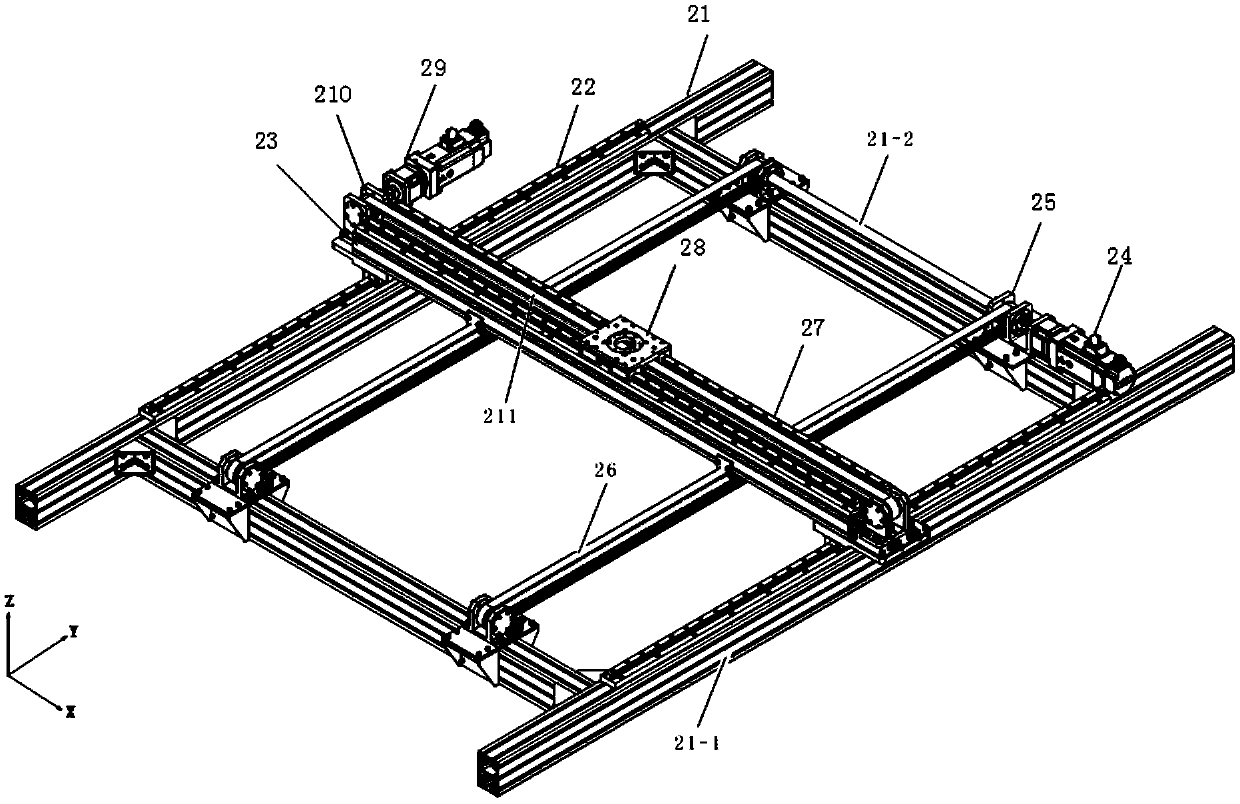
[0015] Specific implementation mode three: combination Figure 1 to Figure 3 To illustrate this embodiment, the two-dimensional motion platform 2 of the low-interference supporting planar position follow-up tracking system based on the series double-rod mechanism in this embodiment includes a support frame 21, two Y-direction linear guide rails 22, two Y-direction Mobile platform 23, first reducer 24, two first synchronous pulleys 25, X-direction linear guide rail 27, X-direction mobile platform 28, second reducer 29 and two second synchronous pulleys 210, two Y-direction The linear guide rails 22 are respectively installed on the two long straight sides 21-1 of the support frame 21, and the center line of the Y-direction linear guide rail 22 along its length direction is parallel to the long straight sides 21-1, and the two Y-direction mobile platforms 23 are respectively Installed on two Y-direction linear guide rails 22, and the Y-direction moving platform 23 can move back ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More