

A Plume Perturbation Based Inertial Parameter Identification Method for Relative Navigation Targets
An inertial parameter and relative navigation technology, applied in the field of inertial parameter extraction, can solve problems such as easy collision and capture aircraft instability, achieve the advantages of accuracy and shorten the observation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
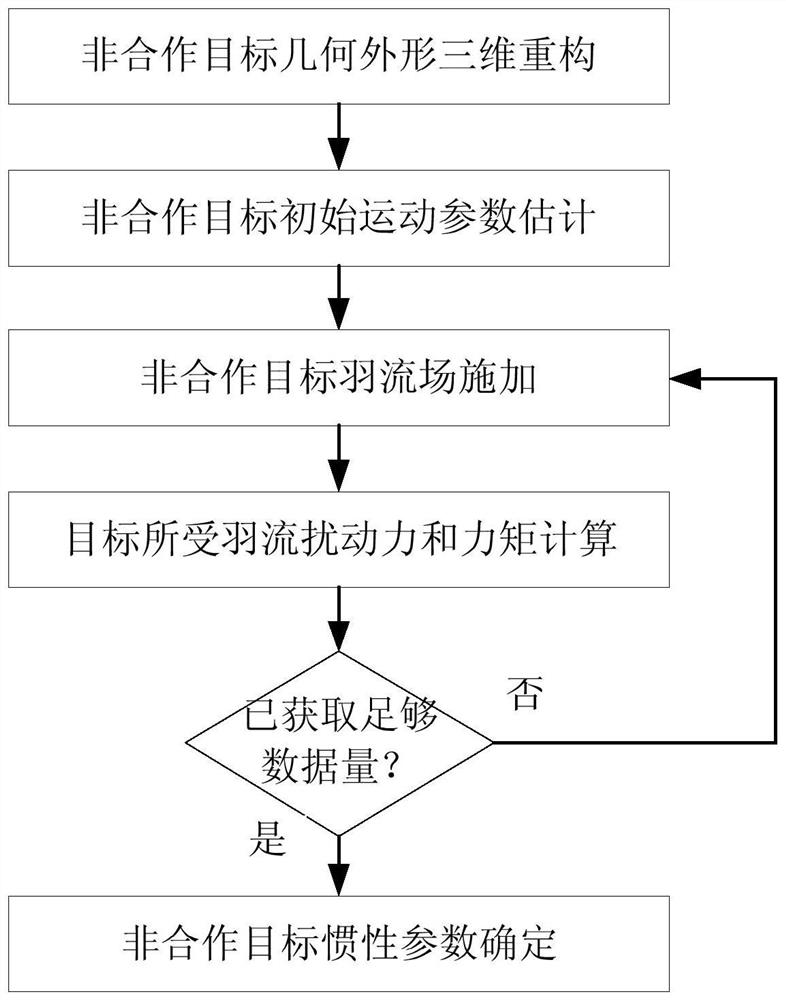
[0032] Such as figure 1 Shown, be the flow chart of the inventive method, mainly comprise the following steps:
[0033] (1) 3D reconstruction of non-cooperative target geometry
[0034] 3D reconstruction is a very classic and popular research field in the field of computer vision. There are already a large number of mature methods available, including stereo vision methods, active distance acquisition methods, and model-based 3D reconstruction methods. In actual use, in order to obtain a more accurate target model, several methods may need to be used in combination. For example, DLR has designed a handheld online scanning 3D reconstruction device, which is composed of stereo vision, laser and texture sensors. Installed on the manipulator to scan and reconstruct 3D objects. Kinect combines active distance acquisition and volume representation to create a more accurate 3D model of an object or scene. There are a large number of open documents in this technical field that can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More