

Staggered arm independent reducing wheel type waterproof pipeline robot
A pipeline robot and variable diameter wheel technology, which is applied in the field of robotics, can solve the problems of the pipeline robot's variable diameter method being rigid, inflexible, and prone to interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing, the present invention will be further described:
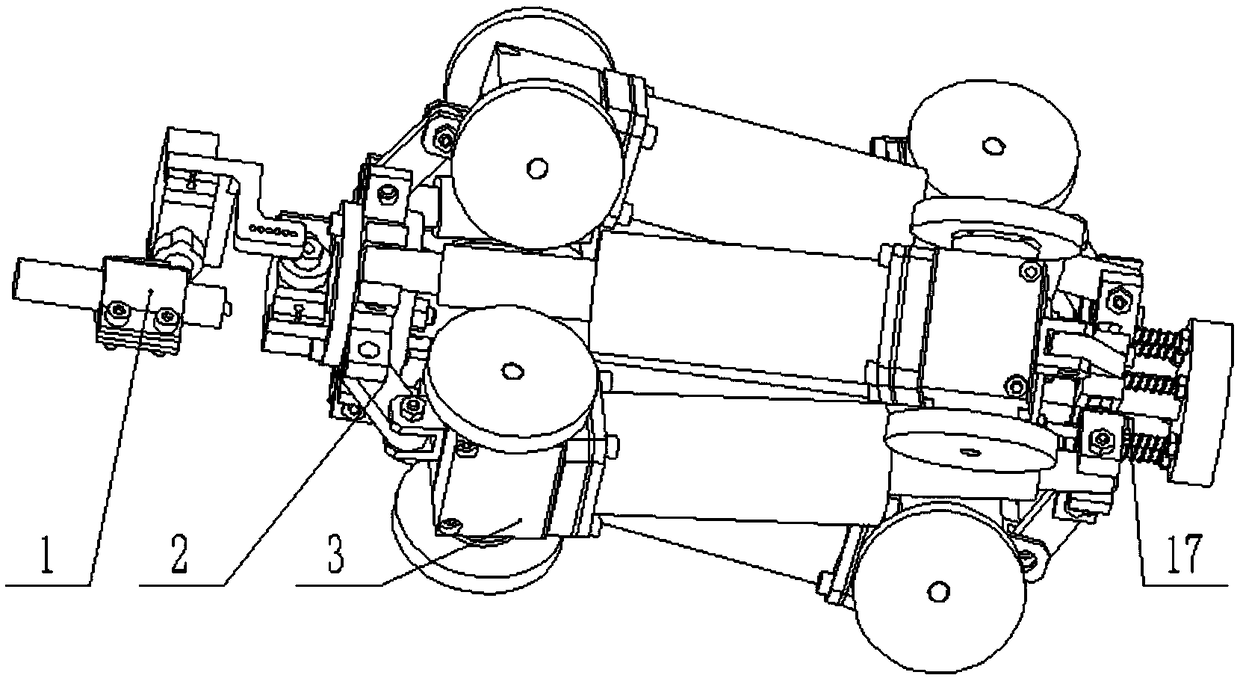
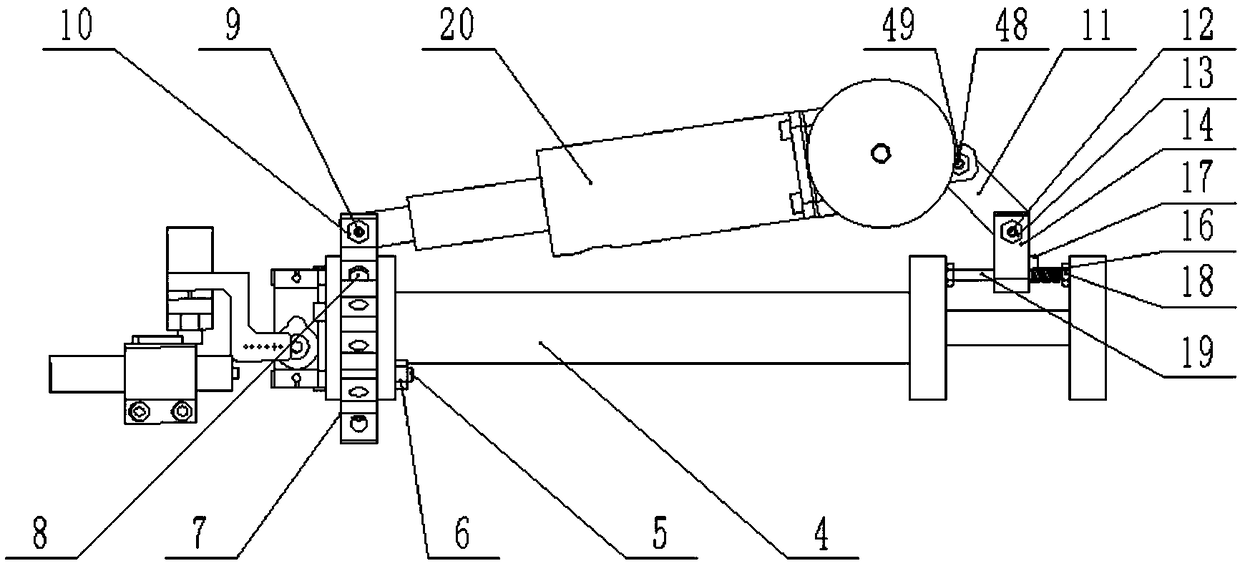
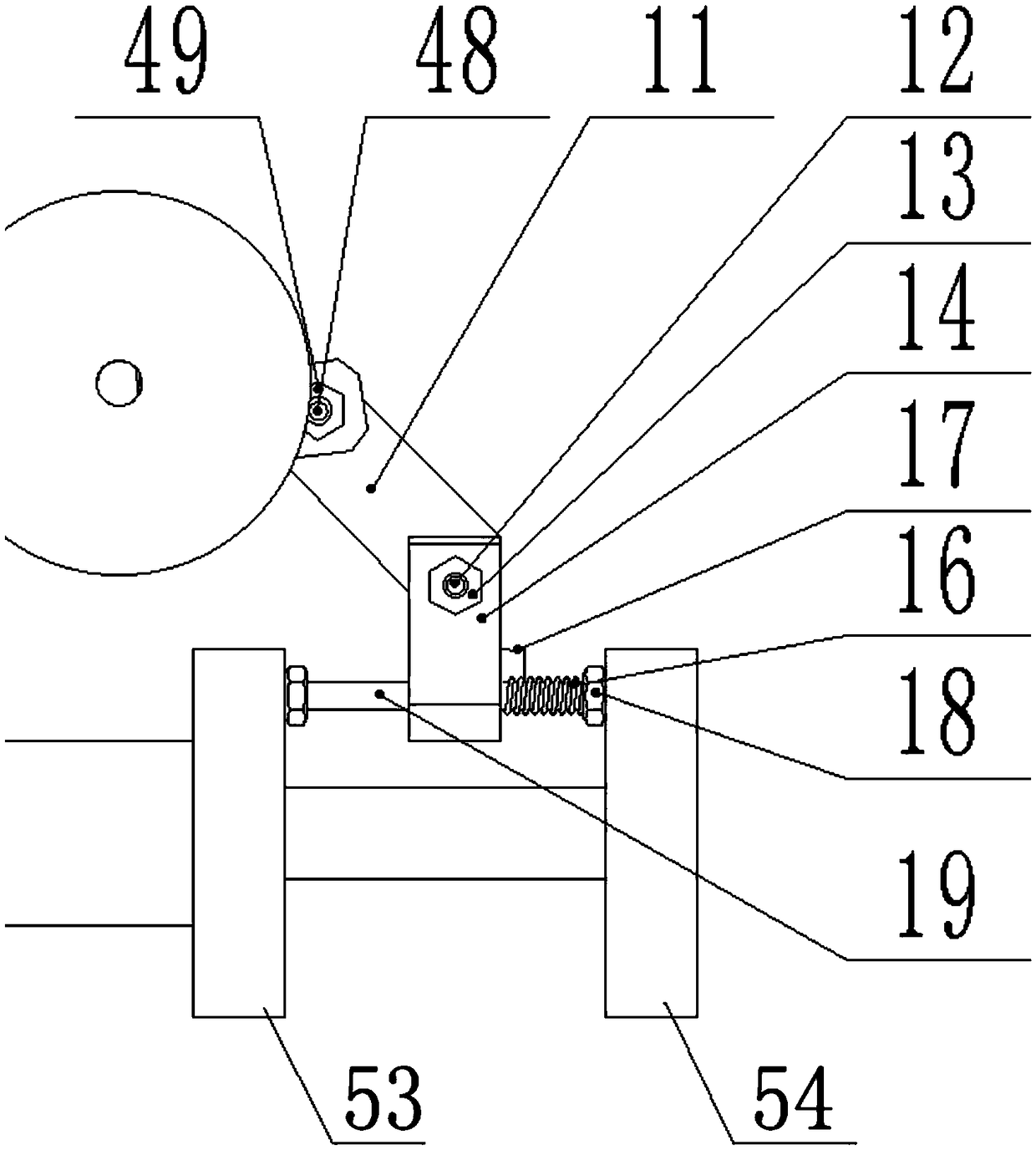
[0032] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 and Figure 10 As shown, it includes an imaging device 1, a diameter reducing mechanism 2, a waterproof traveling mechanism 3 and an anti-seize pull ring 17.
[0033]The front end of the motor barrel 20 in the waterproof running mechanism 3 is provided with a positioning plate 32, and the motor 21 is positioned in the motor barrel 20 and is fixed on the positioning plate 32, which is convenient for installation and disassembly. The gap between the positioning plate 32 and the motor barrel 20 is provided with a positioning plate gasket 33 for sealing to prevent water from entering the gap between the positioning plate 32 and the motor barrel 20 . The front end of the gearbox spacer 31 is provided with a split gearbox, and the gearbox gasket 31 con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More