

Dual radar modified sequential Gaussian mixture probability hypothesis density filtering method
A technology of Gaussian mixture probability and hypothetical density, which is applied in radio wave measurement system, radio wave reflection/reradiation, utilization of reradiation, etc., can solve problems such as target loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
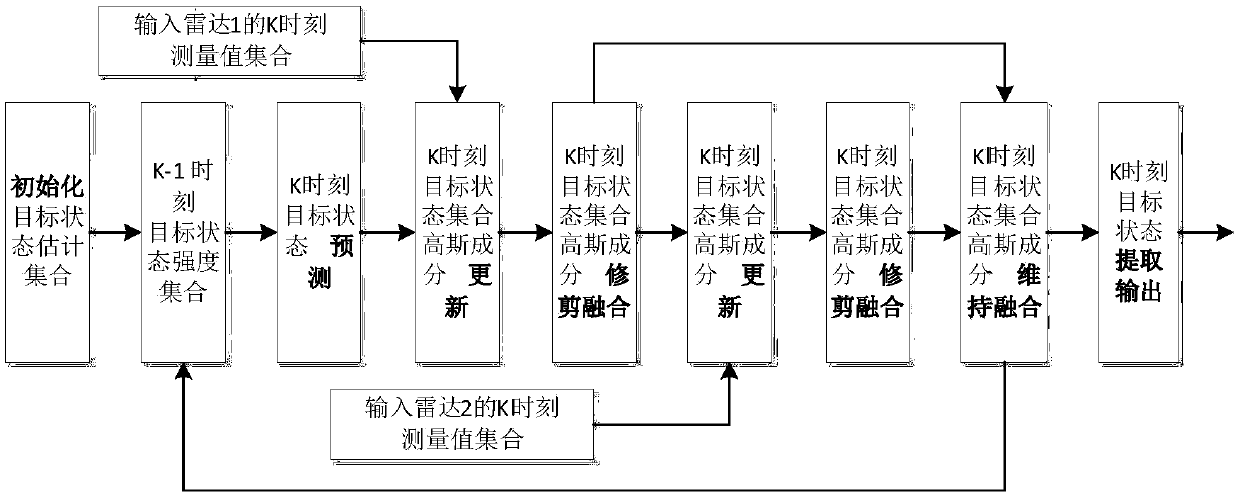
[0076] The corrected sequential GM-PHD filtering in the dual radar system of the present invention can give the Gaussian term as the output of the filter, and after the filter prediction, updating, cutting and merging and maintaining the fusion, the filter outputs the target state. In this embodiment, the system equation is:
[0077] x k =F k *X k-1 +w k-1 (Formula 1)
[0078] in Represents the target state vector at time k, each component corresponds to the position and velocity of the target, and the system noise w k ~N(0,Q k ), the state transition matrix and the noise variance matrix are respectively
[0079]
[0080] The measurement equations are
[0081]
[0082] in measurement noise
[0083] Such as figure 1 As shown, the present invention mainly includes: an initialization module, a radar 1 Gaussian component prediction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More