A four-degree-of-freedom flexible needle puncture platform combining macro and micro movements
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A flexible needle and degree of freedom technology, applied in the field of medical devices, can solve the problems of non-deformable error compensation, error, flexible needle puncture deformation, etc., and achieve the effect of ensuring high precision, convenient control, and good fine-tuning effect
Inactive Publication Date: 2021-04-27
TIANJIN UNIV
View PDF10 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, such a puncture platform will often cause puncture deformation of the flexible needle when operating the oblique-tipped flexible needle, and the error compensation of the deformation cannot be performed through a suitable control strategy
Other scholars have also designed four-degree-of-freedom puncture platforms. However, most of them only have the macroscopic X-axis, Y-axis, Z-axis, and axial rotation degrees of freedom. Such a puncture platform can play a role in the positioning of flexible needles. When the deformation of the flexible needle occurs during the process, the fine adjustment of the X-axis and Y-axis cannot be used to perform error compensation
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0022] In order to further understand the content of the invention, features and effects of the present invention, the following embodiments are exemplified and described in detail with the accompanying drawings as follows:
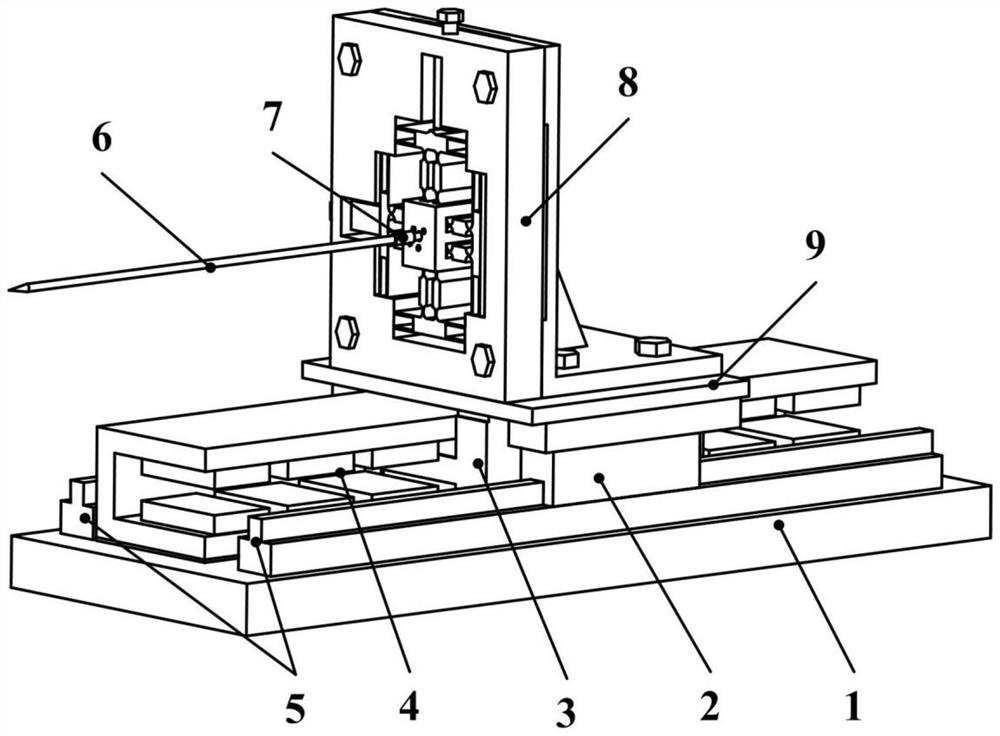
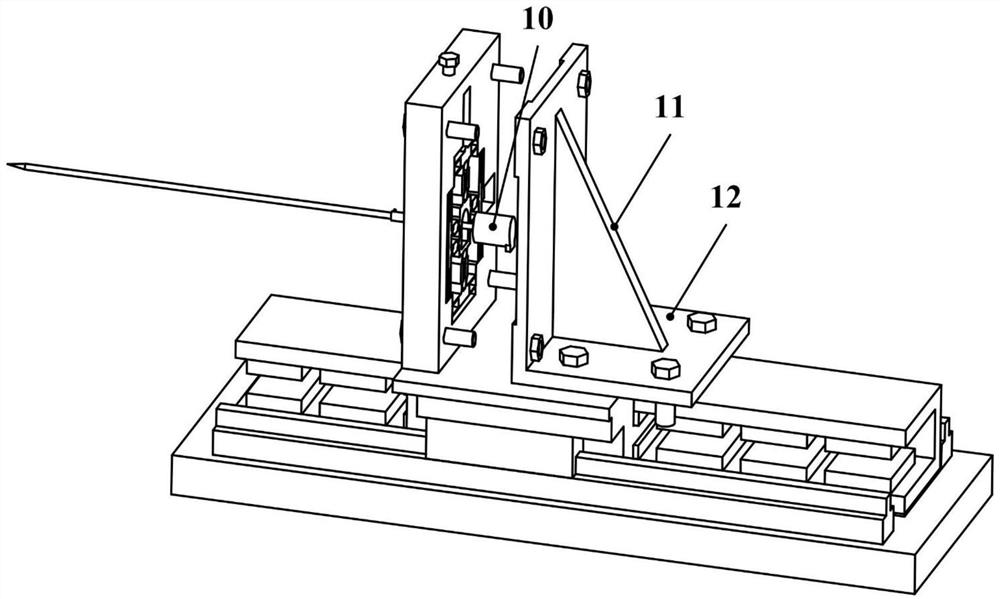
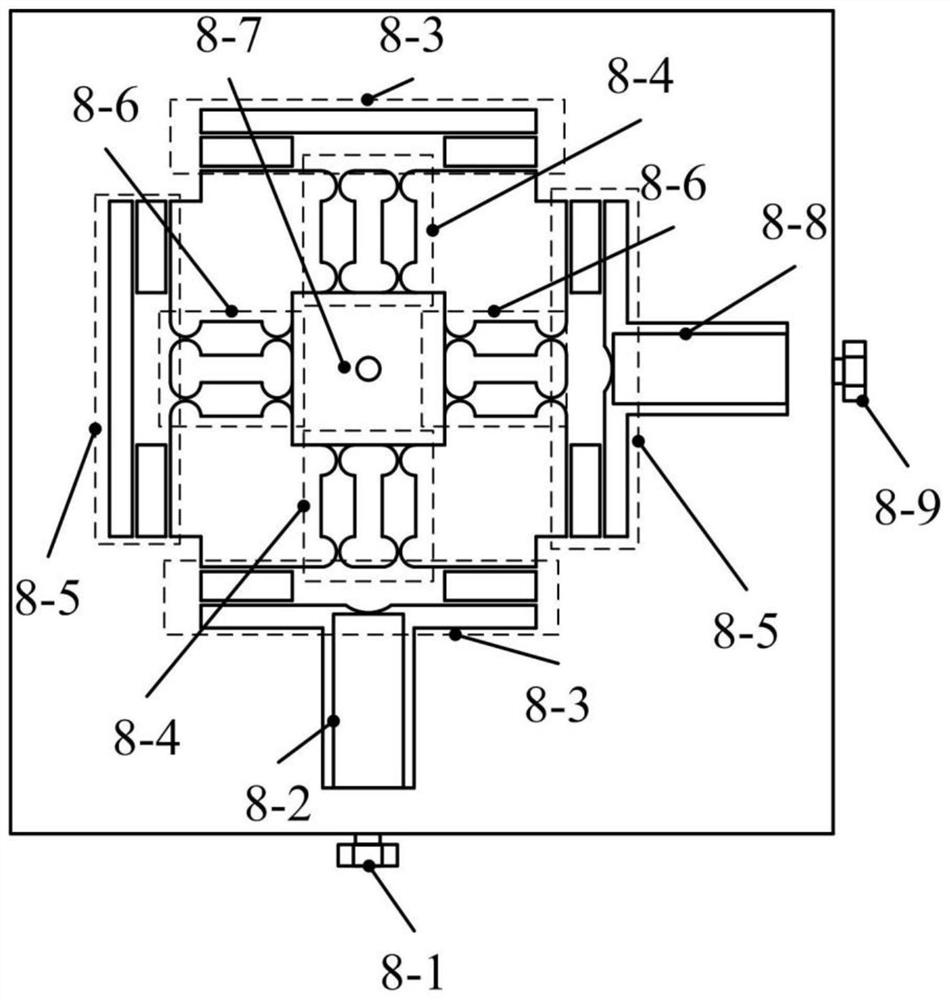
[0023] see Figure 1 to Figure 3 , the embodiment of the present invention protects a four-degree-of-freedom flexible needle puncture platform combining macro-movement and micro-movement, including a base 1, a guide rail 5, a slider 2, a linear motor stator 4, a linear motor mover 3, and a Z-axis platform 9 , XY stage 8, X-axis piezoelectric ceramic driver 8-8, X-axis preload bolt 8-9, X-axis double parallel mechanism 8-5, X-axis transmission hinge 8-6, Y-axis piezoelectric ceramic driver 8-2 , Y-axis pre-tightening bolt 8-1, Y-axis double parallel mechanism 8-3, Y-axis transmission hinge 8-4, XY platform end effector 8-7, rotary motor 10, rotary motor coupling 7, rib plate 11 , mount 12, flexible needle 6.
[0024] In this embodiment, the base 1 is a r...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a four-degree-of-freedom flexible needle puncture platform combining macro motion and micro motion, which includes a base, a guide rail, a slider, a linear motor stator, a linear motor mover, a Z-axis platform, an XY platform, a rotating motor, and a joint. Shaft, rib, mounting seat and flexible needle; the guide rails are installed symmetrically on both sides of the top of the base, the linear motor stator is installed between the guide rails, the linear motor mover is embedded in the gap between the upper and lower parts of the linear motor stator, and the guide rails on both sides are respectively The sliders are slidingly connected; the sliders on both sides are symmetrically distributed on both sides of the Z-axis platform and connected to the Z-axis platform through bolts; the XY platform is connected to the Z-axis platform through bolts; the XY platform includes X-axis piezoelectric ceramics Driver, X-axis pre-tightening bolt, Y-axis piezoelectric ceramic driver, Y-axis pre-tightening bolt, X-axis transmission mechanism, Y-axis transmission mechanism and XY platform end effector. For the first time, the platform adopts the combination of macro and micro, which can realize macro puncture and micro adjustment, and has the functions of positioning, puncture and direction adjustment.
Description
technical field [0001] The invention belongs to the field of medical devices, and in particular relates to a four-degree-of-freedom flexible needle puncturing platform with puncturing and positioning performance combining macro-motion and micro-motion. Background technique [0002] In recent years, with the rise of minimally invasive interventional medicine, high-end minimally invasive surgical robots have gradually been widely used in various fields of medical surgery. For minimally invasive medical robots used in percutaneous puncture surgery, the end effector is often a thin and long bevel-pointed flexible needle. The traditional rigid needle cannot avoid important organs and tissues during the puncture process, however, the flexible needle is widely used due to its strong maneuverability. Therefore, the flexible needle can reach an effective target area by establishing an appropriate kinematic model and manipulation strategy. As an important part of performing flexible...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More