

Underwater robot six-degree-of-freedom dynamic positioning thrust distribution optimization method based on genetic algorithm
An underwater robot, thrust distribution technology, applied in the direction of instruments, non-electric variable control, height or depth control, etc., can solve problems such as complex realization, and achieve the effect of reducing coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with accompanying drawing:
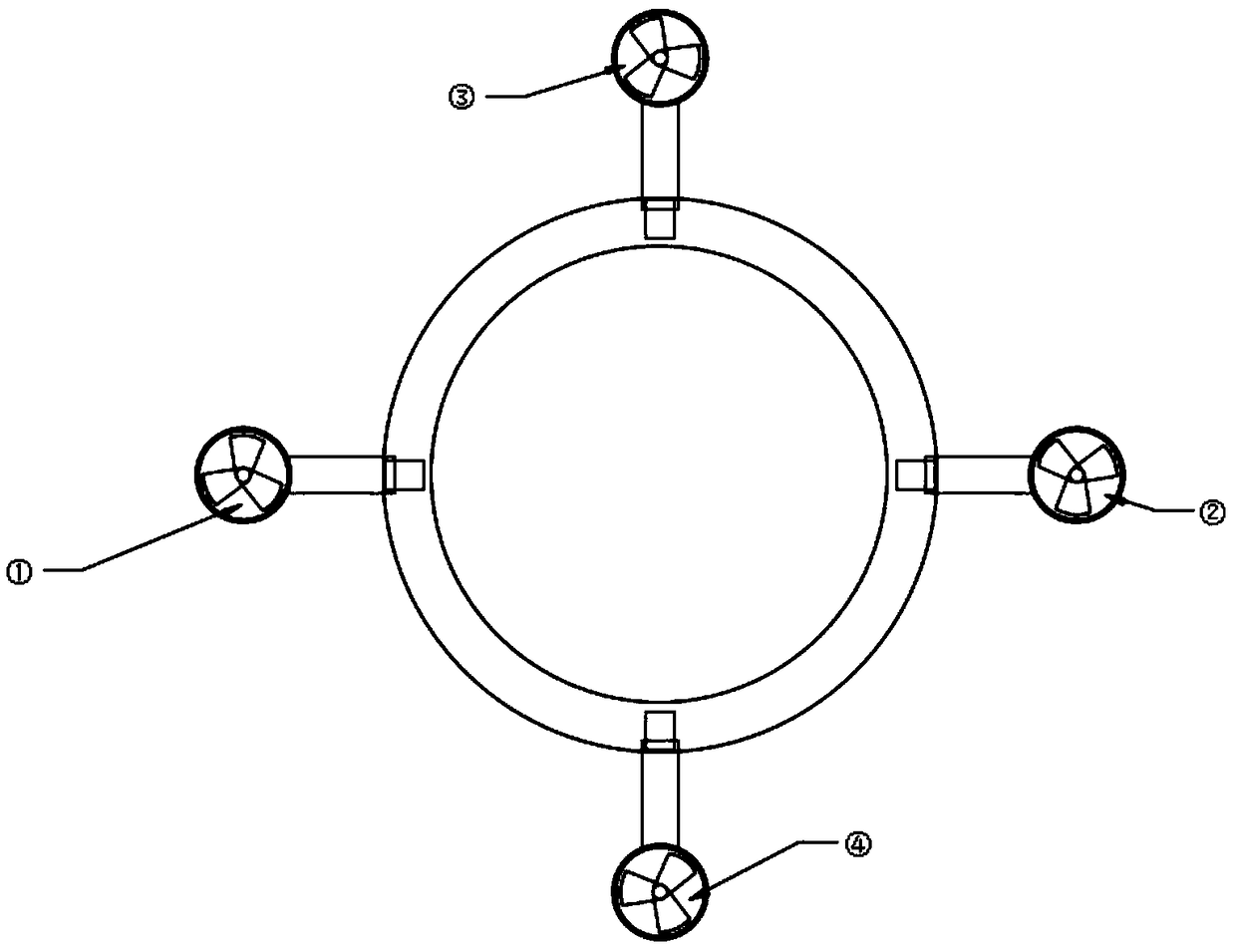
[0037] as attached figure 1 As shown, it is a schematic diagram of propeller layout of the present invention; propeller ① is installed on the left side of the robot, which can generate forward or backward horizontal thrust when it is placed horizontally, and can generate upward or backward thrust when it is rotated to a vertical state. Downward thrust produces thrust in both the longitudinal and vertical positions when the propeller is rotated to an intermediate position. The same is true for the propeller ② on the right side. When the thrust provided by the left and right propellers in the vertical direction is not equal, the robot's rolling motion can be realized. Also for the front and rear propellers ③, ④, they can provide thrust in both horizontal and vertical directions. When the propellers ③ and ④ provide different thrusts in the vertical direction, they can provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More