

Variable-diameter crawler-type robot mechanism used for colon diagnoses and examinations
A crawler-type and robotic technology, applied in the direction of sigmoidoscopy, diagnosis, application, etc., can solve the problems of low efficiency of action execution, inability to realize variable diameter and dwelling functions, etc., achieve clever design, improve action execution efficiency, and avoid missed diagnosis Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
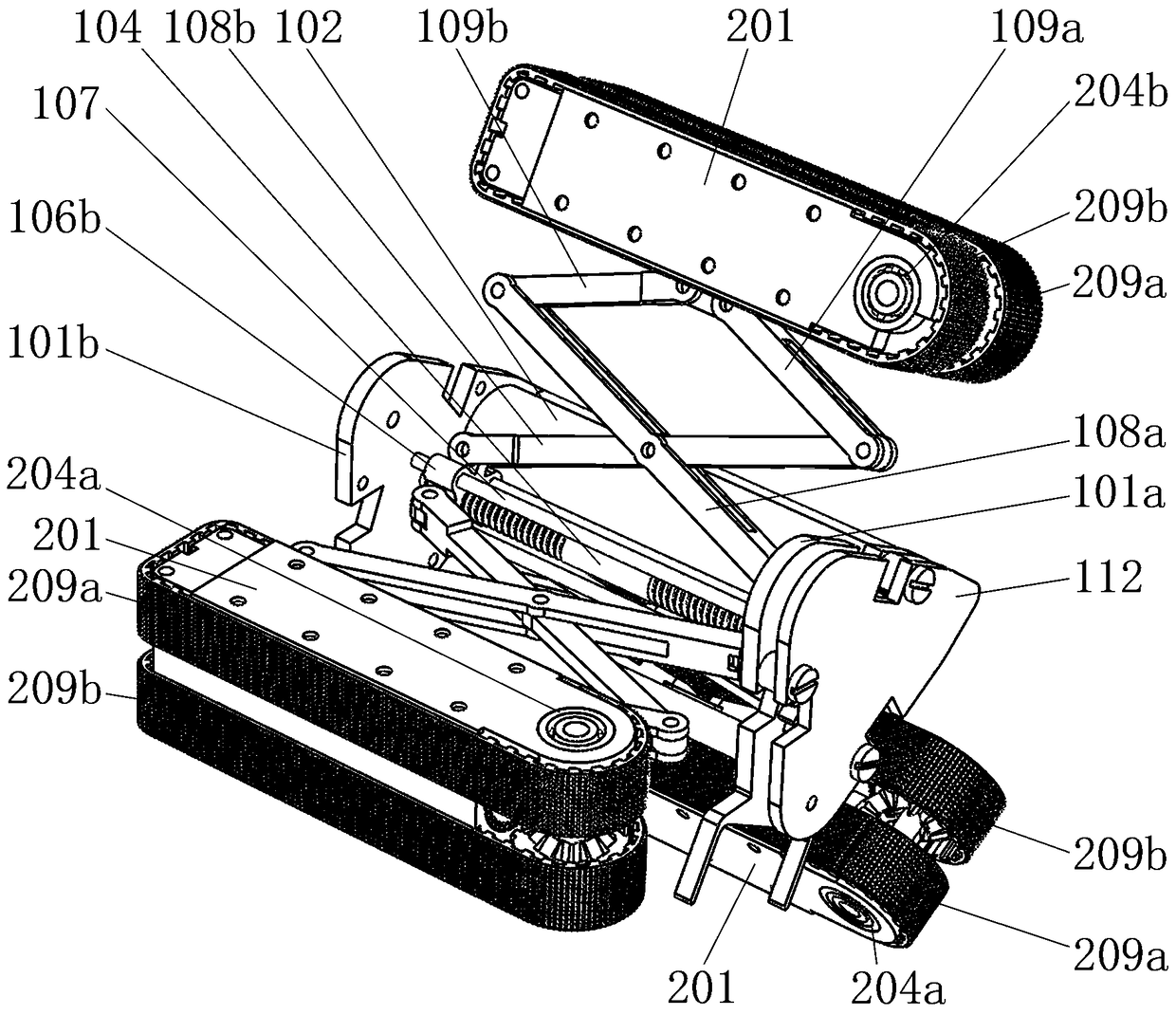
[0026] A variable-diameter crawler robot mechanism for colon diagnosis, including a variable-diameter sub-mechanism and three traveling sub-mechanisms;
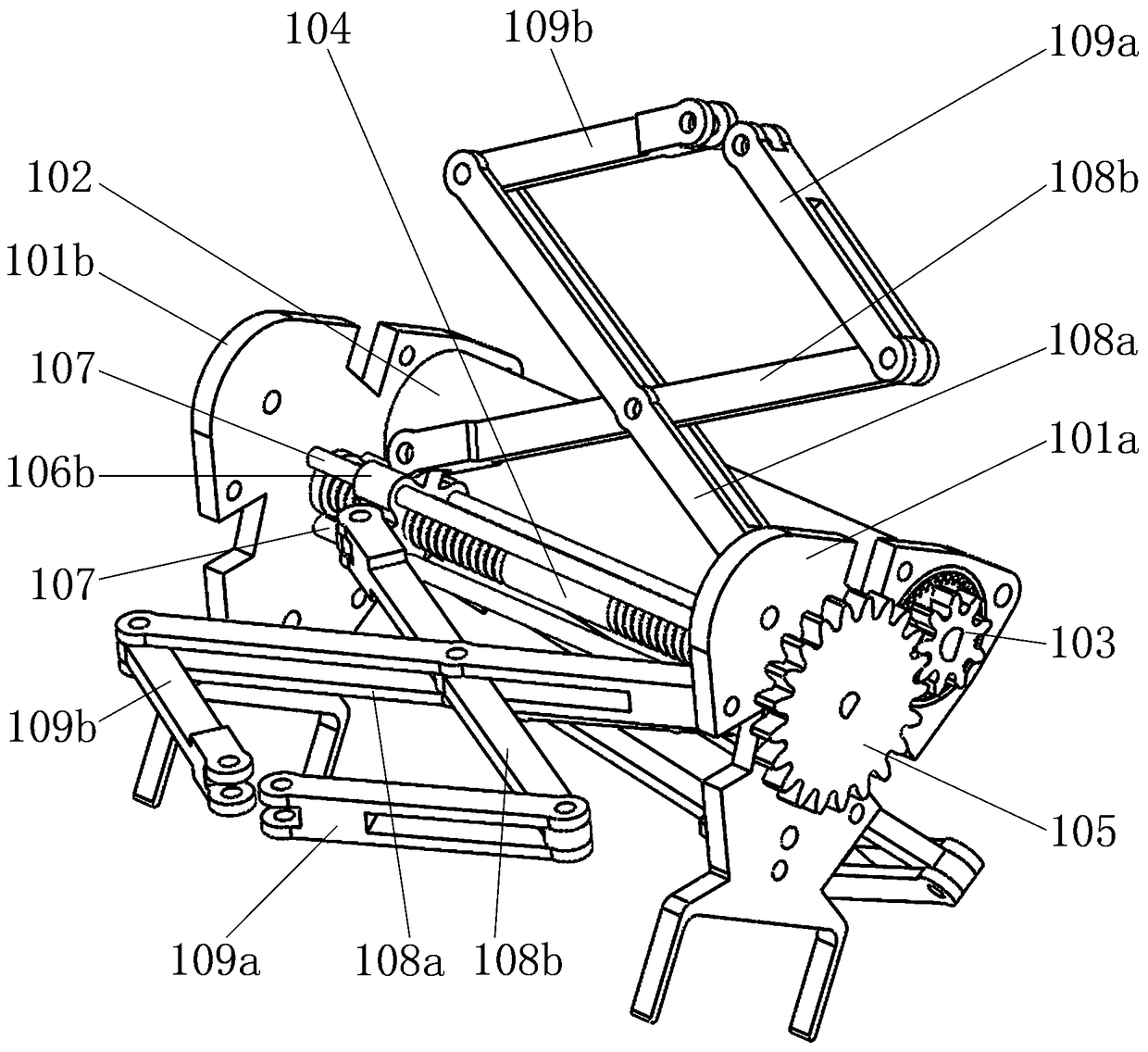
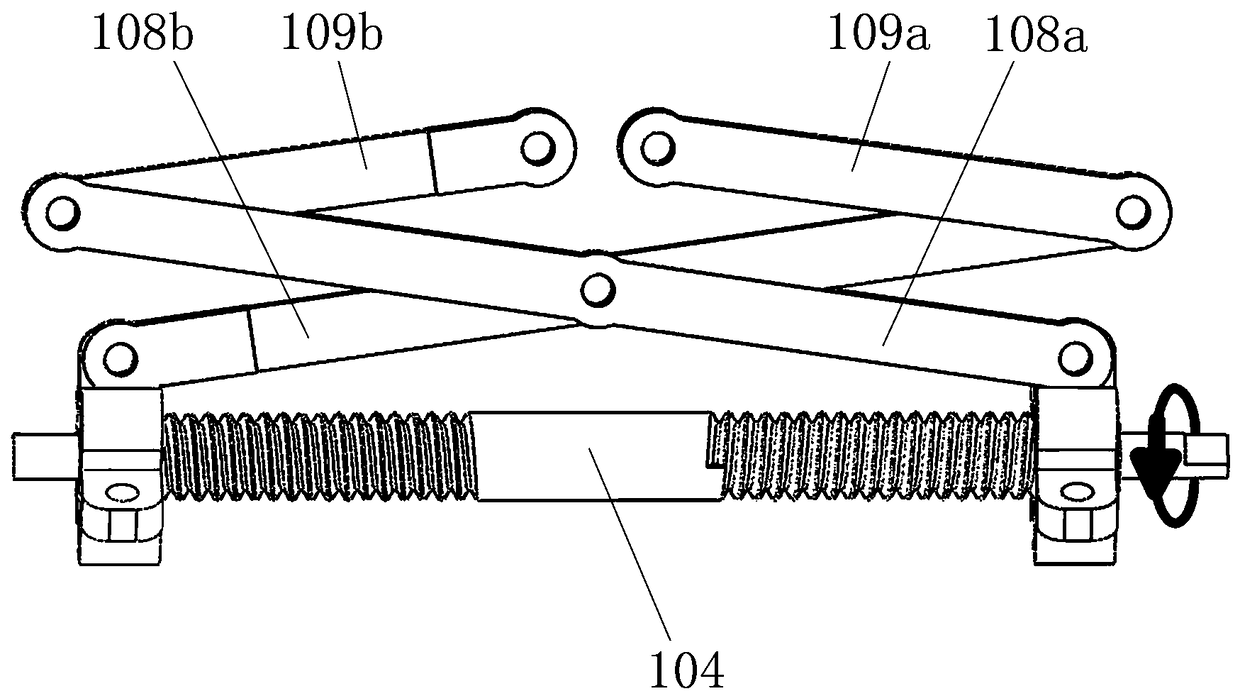
[0027] Described variable diameter sub-mechanism comprises front baffle plate 101a, rear baffle plate 101b, the first DC motor 102, driving gear 103, leading screw 104, driven gear 105, front nut 106a, rear nut 106b, three guide rods 107, three a four-bar linkage;
[0028]Described each four-bar linkage mechanism all comprises front active rod 108a, rear active rod 108b, front driven rod 109a, rear driven rod 109b; The head end of the driving rod 109a is hinged with the tail end of the rear active rod 108b; the head end of the rear driven rod 109b is hinged with the tail end of the front driving rod 108a;
[0029] The front baffle 101a and the rear baffle 101b face each other; the base of the first DC motor 102 is fixedly installed between the front baffle 101a and the rear baffle 101b, and the output shaft of the first I DC...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More