Winding reconstruction method for permanent-magnet fault-tolerant rim stepping motor to reduce mutual inductance
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of rim propulsion and motor winding, which is applied to the shape/style/structure of the winding conductor to achieve the effect of increasing the self-inductance of the winding, increasing the width of the notch, and reducing the thickness of the notch
Active Publication Date: 2018-11-20
DALIAN MARITIME UNIVERSITY +1
View PDF8 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Moreover, the number of slots of the existing winding structure for reducing mutual inductance must be an even multiple of 2m
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0048] 36-slot 30-pole forward winding double Y-shift 60° symmetrical six-phase permanent magnet fault-tolerant rim propulsion motor
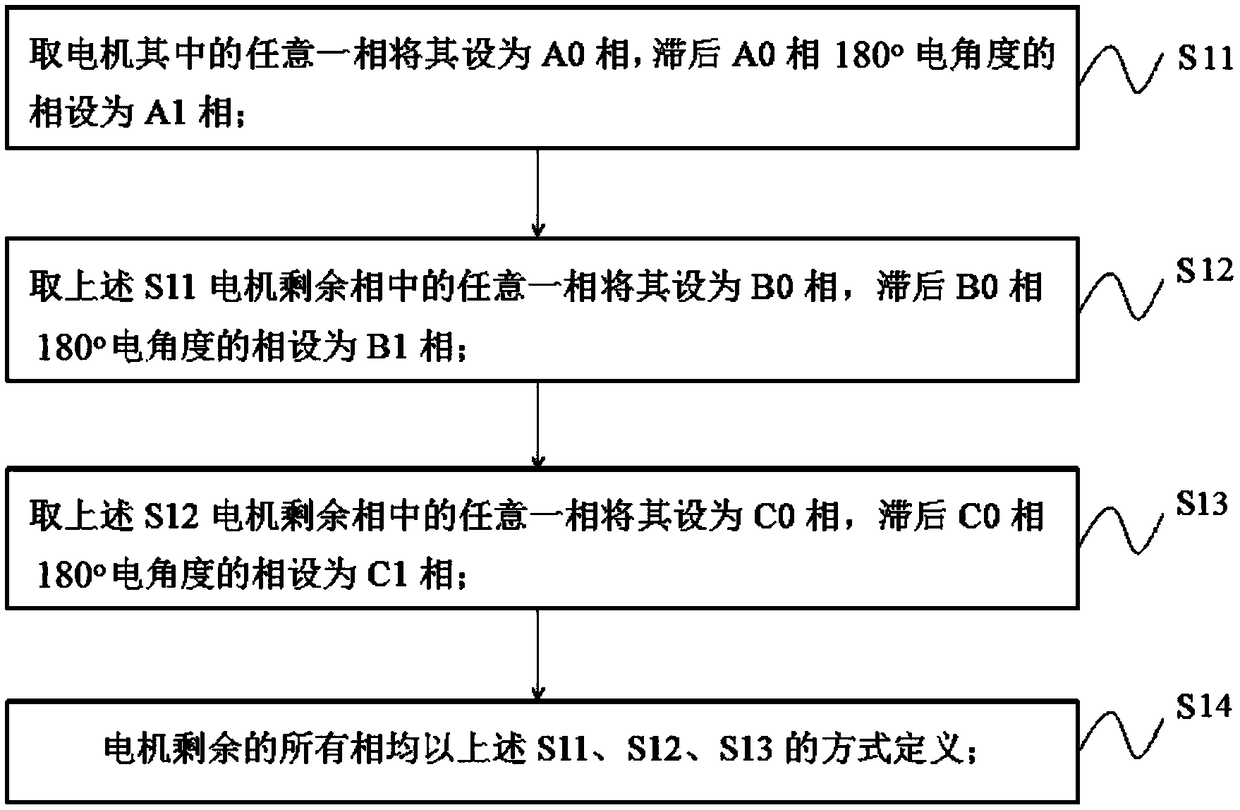
[0049] Restructure the front winding structure as Figure 4 As shown, the six-phase windings are A, B, C, U, V, W respectively. Take the winding of phase A as a reference, set it as phase A0, and the phase lagging behind phase A by 180° in electrical angle is phase V and set it as phase A1.
[0050] For the remaining phases B, C, U, and W, take phase B as a reference and set it as phase B0, and the phase that lags phase B by 180° in electrical angle is phase W and set it as phase B1.
[0051] For the remaining C and U phases, take the C phase as a reference and set it as the C0 phase, and the U phase that lags the C phase by 180° electrical angle is the U phase and set it as the C1 phase. All phase definitions are complete.
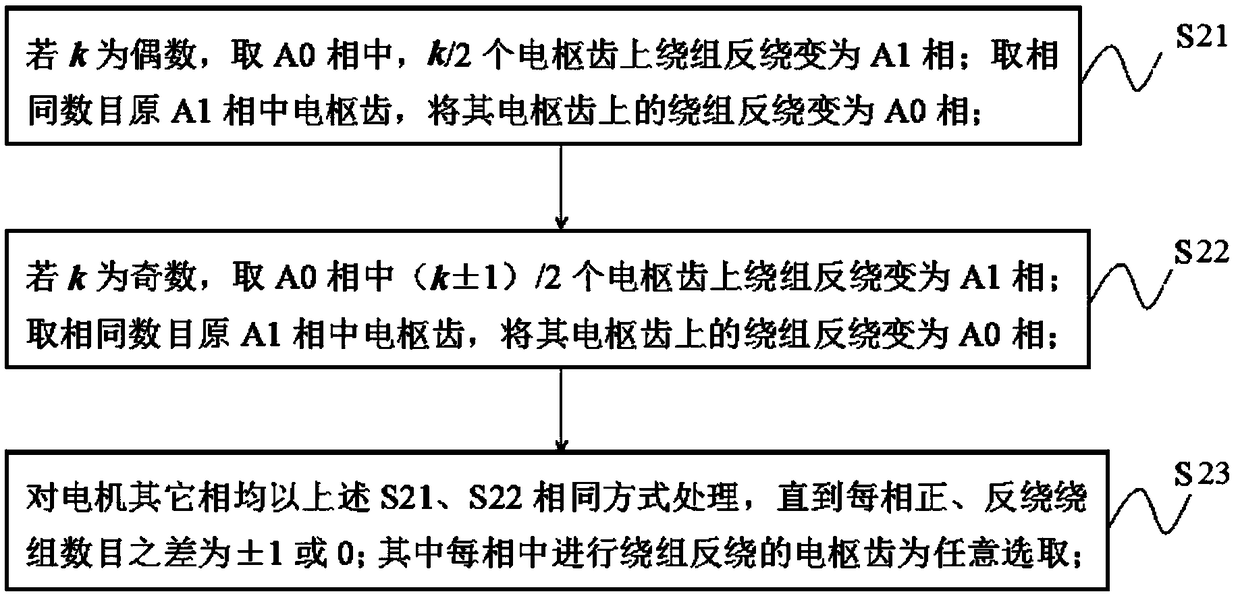
[0052] The number of motor slots is 2km, that is, 36 slots, where m is 6, and k is 3.
[0062] Restructure the front winding structure as Figure 9 As shown, the six-phase windings are A, B, C, U, V, W respectively. Take the winding of phase A as a reference, set it as phase A0, and the phase lagging behind phase A by 180° in electrical angle is phase V and set it as phase A1.
[0063] For the remaining phases B, C, U, and W, take phase B as a reference and set it as phase B0, and the phase that lags phase B by 180° in electrical angle is phase W and set it as phase B1.
[0064] For the remaining C and U phases, take the C phase as a reference and set it as the C0 phase, and the U phase that lags the C phase by 180° electrical angle is the U phase and set it as the C1 phase. All phase definitions are complete.
[0065] The number of motor slots is 2km, that is, 48 slots, where m is 6, and k is 4.
[0066] k is an even numbe...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
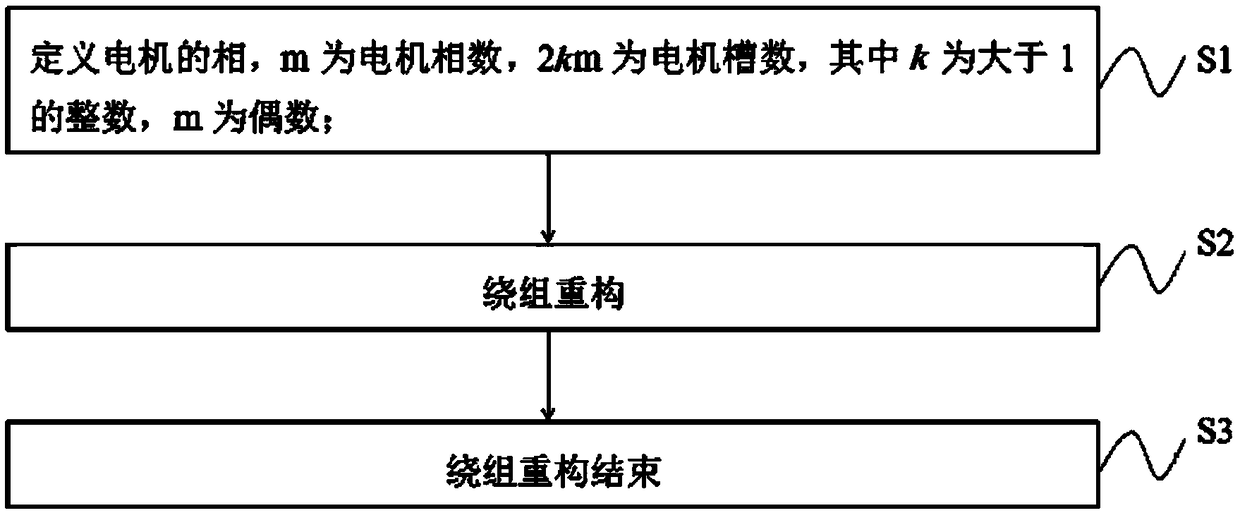
Abstract
The invention provides a winding reconstruction method for a permanent-magnet fault-tolerant rim stepping motor to reduce mutual inductance. The winding reconstruction method comprises the steps of S1, defining a motor phase, wherein m is motor phase number, 2km is motor groove number, k is an integer larger than 1, and m is an even number; S2, performing winding reconstruction on the defined motor phase; and S3, ending winding reconstruction. According to the winding reconstruction method for the permanent-magnet fault-tolerant rim stepping motor to reduce mutual inductance, winding reconstruction can be performed on an arbitrary permanent-magnet fault-tolerant rim stepping motor with 2km grooves to reduce the mutual inductance, k is the integer larger than 1, m is the even number, the self-inductance of a winding is improved, the mutual inductance of a 36-groove and 30-pole symmetric six-phase permanent-fault rib stepping motor is reduced, moreover, the beneficial influence of improving the self-inductance of the winding is only caused, and no influence on other motor performance parameters such as on-load counter electromotive force and magnetomotive forceharmonicdistortion rate is generated.
Description
technical field [0001] The invention relates to a permanent magnet fault-tolerant rim propulsion motor for an integrated motor propeller, in particular to a winding reconfiguration method for a permanent magnet fault-tolerant rim propulsion motor with reduced mutual inductance. Background technique [0002] In order to improve the fault-tolerant performance of the permanent magnet fault-tolerant rim propulsion motor and the ability to limit the short-circuit current, it is required that each phase winding of the motor has a unit inductance, and each phase has a low mutual inductance. [0003] Patent document CN201711029288 discloses a permanent magnet fault-tolerant rim propulsion motor for an integrated motor propeller. The motor includes a stator core, stator slots, armature teeth, isolation teeth, armature windings, an air gap, a magnetic pole protection sleeve, and a magnetic pole protection layer. , Centrifugal permanent magnet, rotor core, propeller welded inside the r...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More