

A sky-ground integrated citrus picking method
A citrus, heaven and earth technology, applied in the direction of image enhancement, instruments, agricultural machinery and implements, etc., can solve the problems of low efficiency, uneven growth of fruits between branches and the front and back, short time of UAV staying in the air, etc., to achieve automation Accurate collection, avoiding the effect of large changes in sunlight intensity and angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
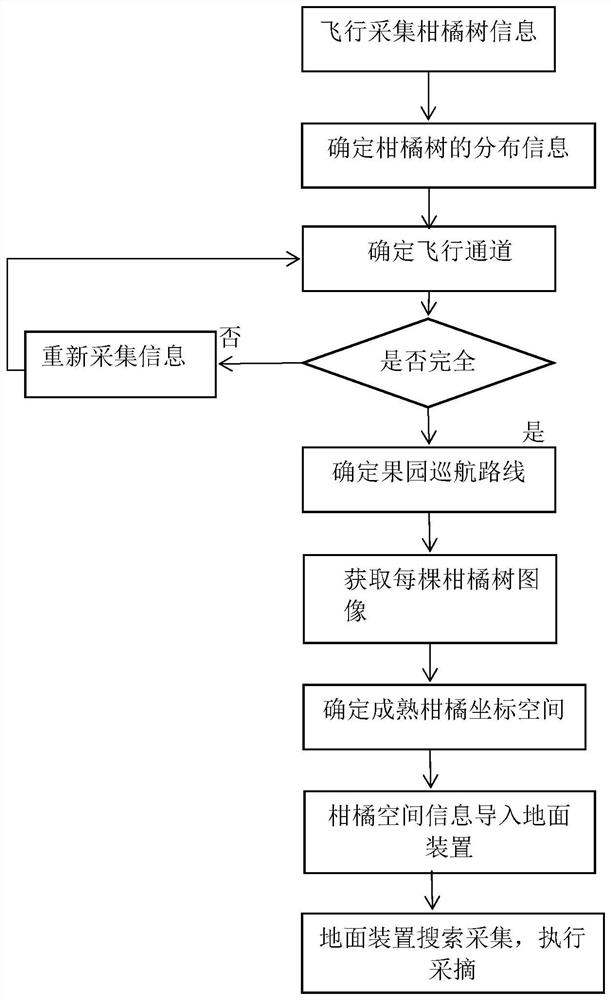
[0032] A method for picking citrus fruits integrated with space and ground, comprising the following steps:
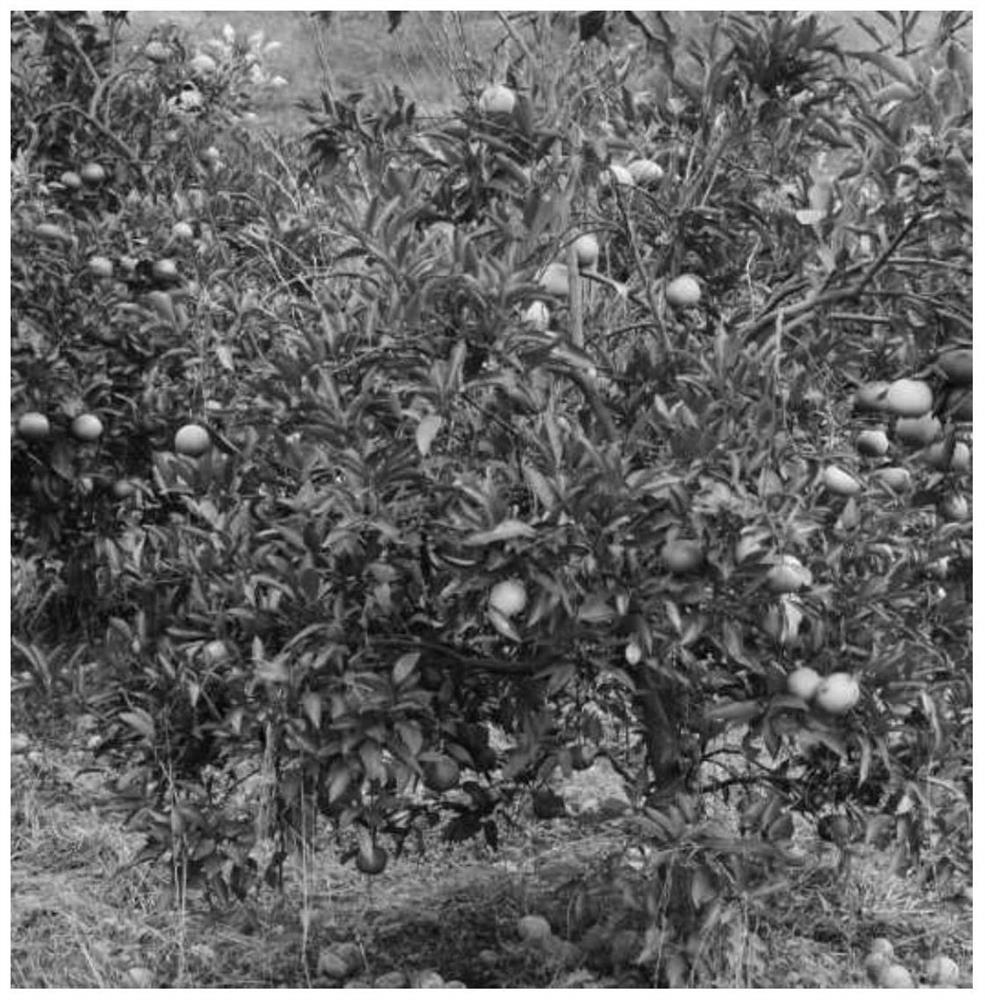
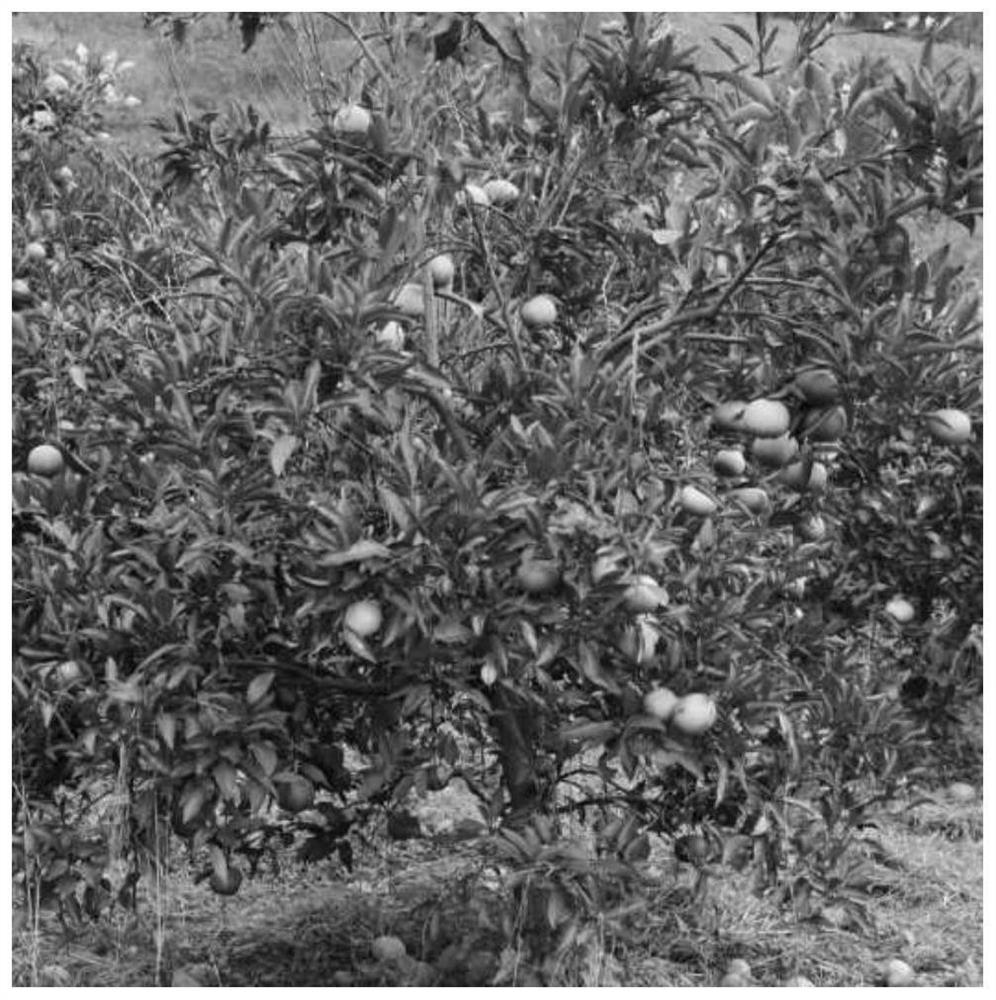
[0033] Step S1, use the UAV equipped with differential satellite positioning device and binocular vision positioning device, choose the weather where the wind force does not affect the stable flight of the UAV and the light is suitable for shooting by the binocular vision positioning device, and place the gap between the ranks of citrus trees in the planting area Cruise at a certain height, hover in front of each citrus tree at a fixed height independently, and use the binocular vision positioning device to continuously take pictures, quickly traverse the entire planting area, and obtain image information of citrus trees in the planting area. Through computer image processing technology, Segment the mature citrus, and combine the spatial three-dimensional coordinates of the UAV to preliminarily determine the spatial coordinates of the mature citrus; Step S2, import and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More