

Escape soft robot capable of running by sticking to wall
A robot and software technology, applied in the field of escape soft robots, can solve the problems of not having unlimited degrees of freedom and distributed continuous deformation ability, low environmental adaptability, poor use flexibility, etc., achieve high distributed continuous deformation ability, improve fire safety The effect of escape ability and flexible walking on the wall
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will now be further described in detail in conjunction with the accompanying drawings and embodiments. These drawings are all simplified schematic diagrams, only illustrating the basic structure of the present invention in a schematic manner, so it only shows the composition related to the present invention.
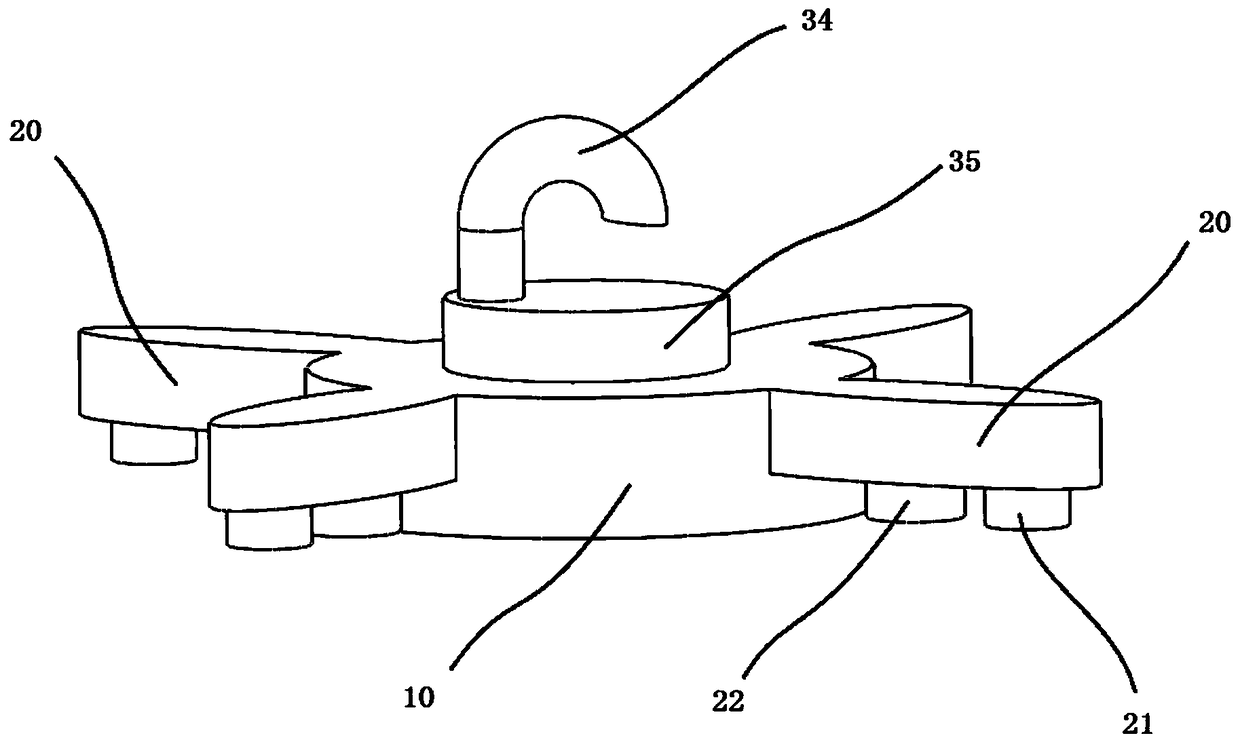
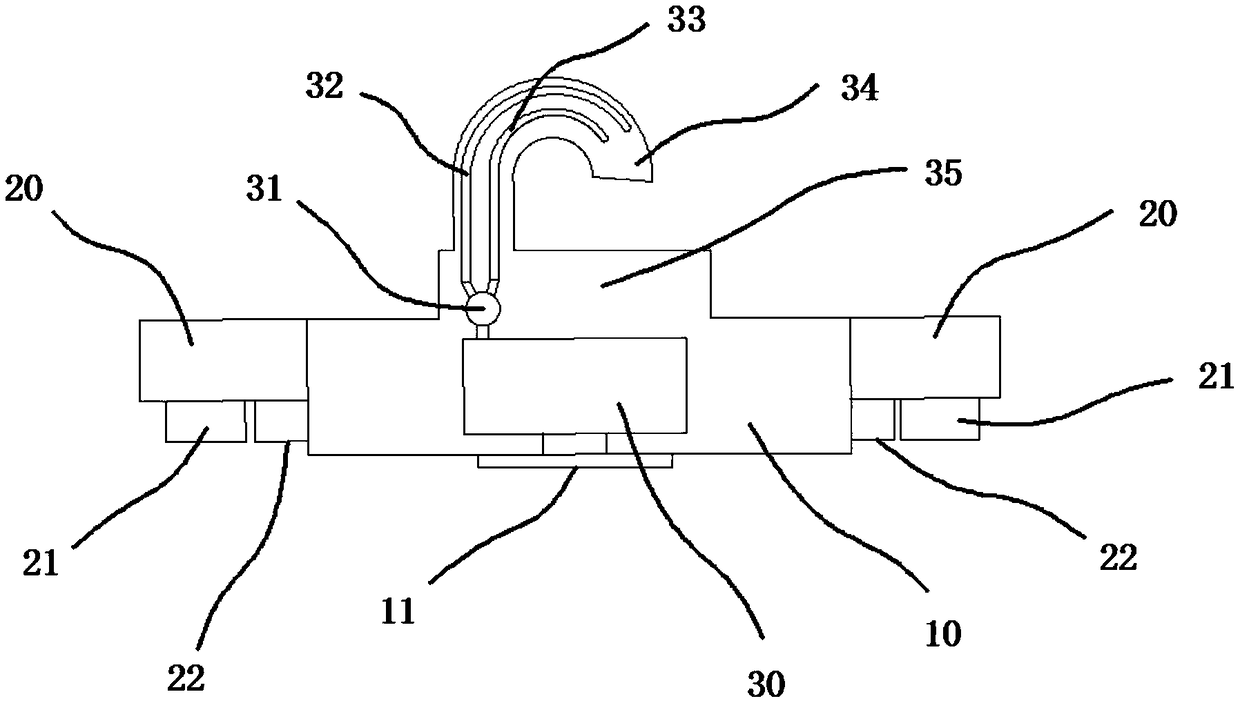
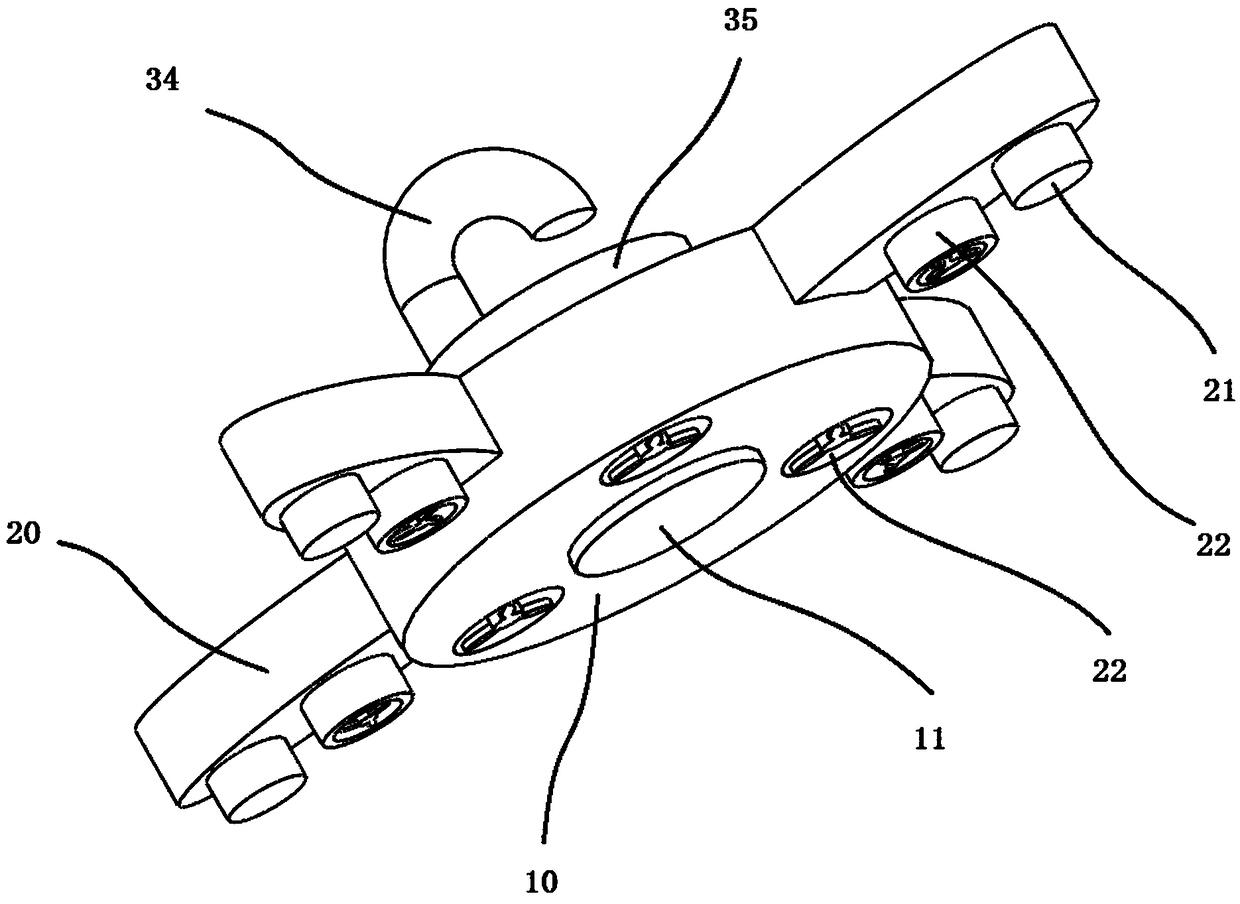
[0028] Such as figure 1 ,Such as figure 2 and as image 3 As shown, the escape soft robot that can walk on the wall includes: a base part 10 , at least one machine arm 34 and a plurality of direction parts 20 .
[0029] Specifically, the top of the base 10 is provided with a guard plate 35, and the bottom of the base 10 is provided with at least one fan 22. When there are multiple fans 22, the fans 22 are arranged at intervals along the circumference of the base 10 at the bottom of the base 10. The end face, the machine arm 34 is arranged on the top end face of the guard plate 35, the first cavity 32 and the second cavity 33 are arranged i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More