

Mechanically-controlled-type automatic discharging manipulator
A technology of automatic cutting and mechanical control, applied in the field of manipulators, can solve the problems of easy damage of electronic components, affecting production efficiency, time-consuming and labor-intensive testing of electronic components and programs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
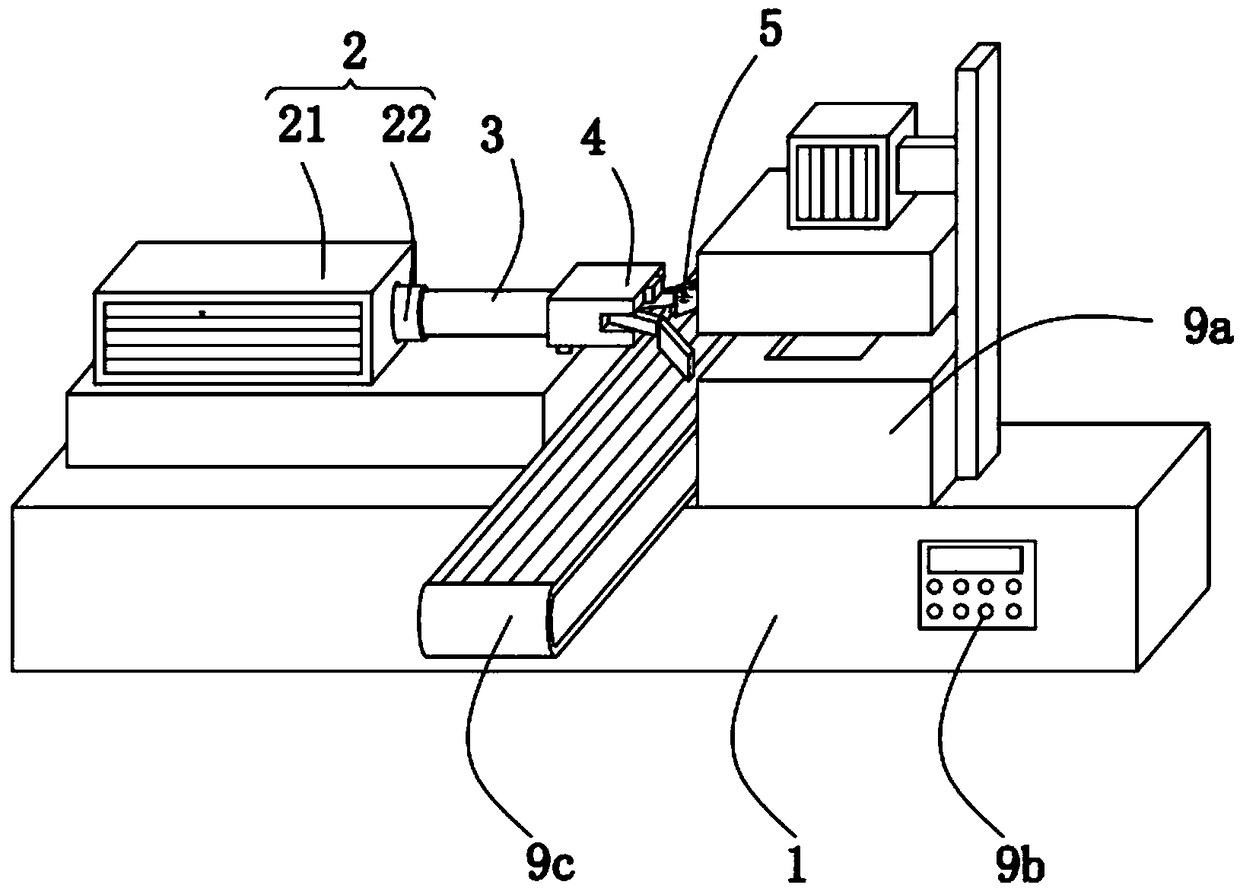
[0029] Implementation method: In the initial state, the pneumatic rod 22 is put into the cylinder 21, the push switch 8 is fixed on the unloading area 312 at the end of the movable rod 3, and the clamping mechanism is located on the top of the conveyor belt 6; when the injection molding of the workpiece is completed, it needs to be picked up At this time, the cylinder 21 drives the pneumatic rod 22 to move outward, and then the pneumatic rod 22 pushes the movable rod 3 to move, the first clamping mechanism 5 and the second clamping mechanism 7 approach the mold, and the switch moves along the blanking area 312, the moving area 311 slides, when the switch moves to the bottom of the first extrusion block 32, the clamping mechanism moves to the outside of the workpiece, and the first extrusion block 32 squeezes the switch to make the switch conduct electricity;
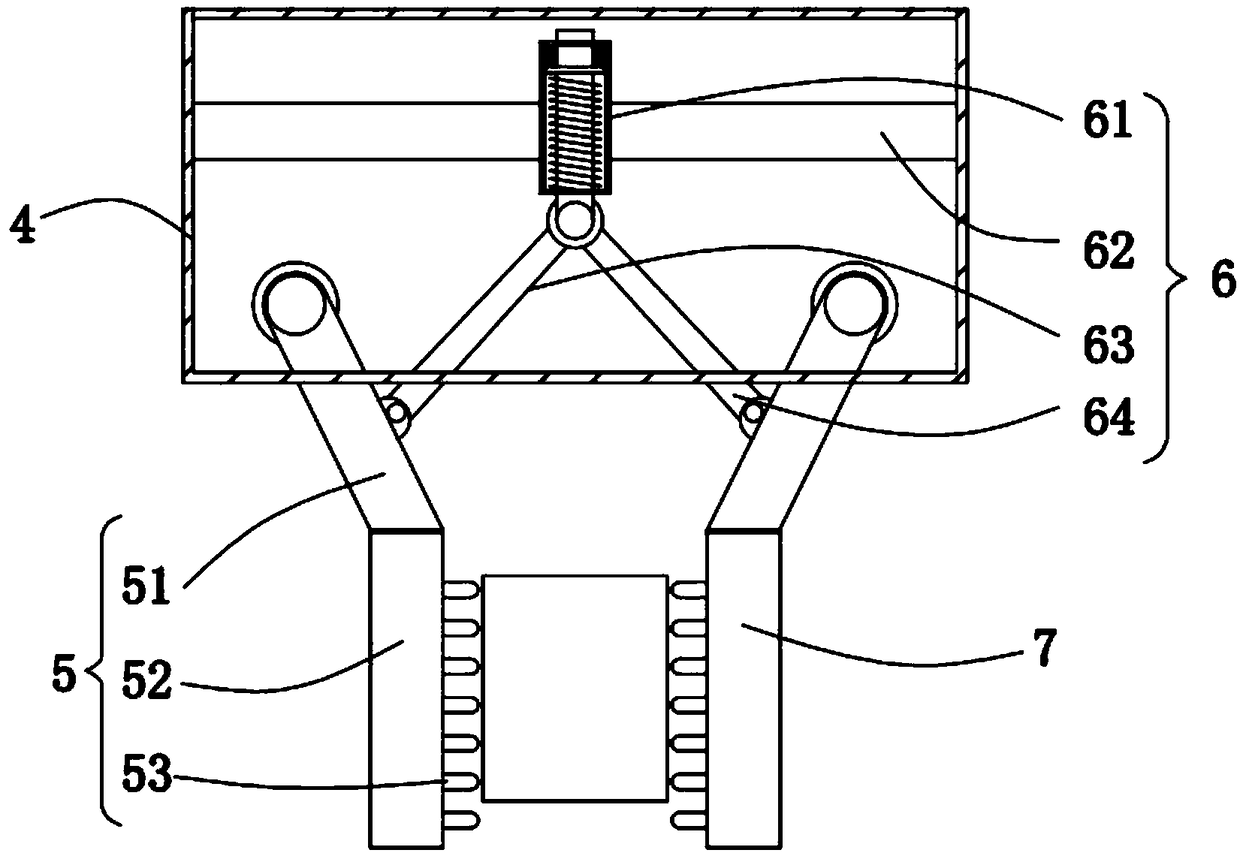
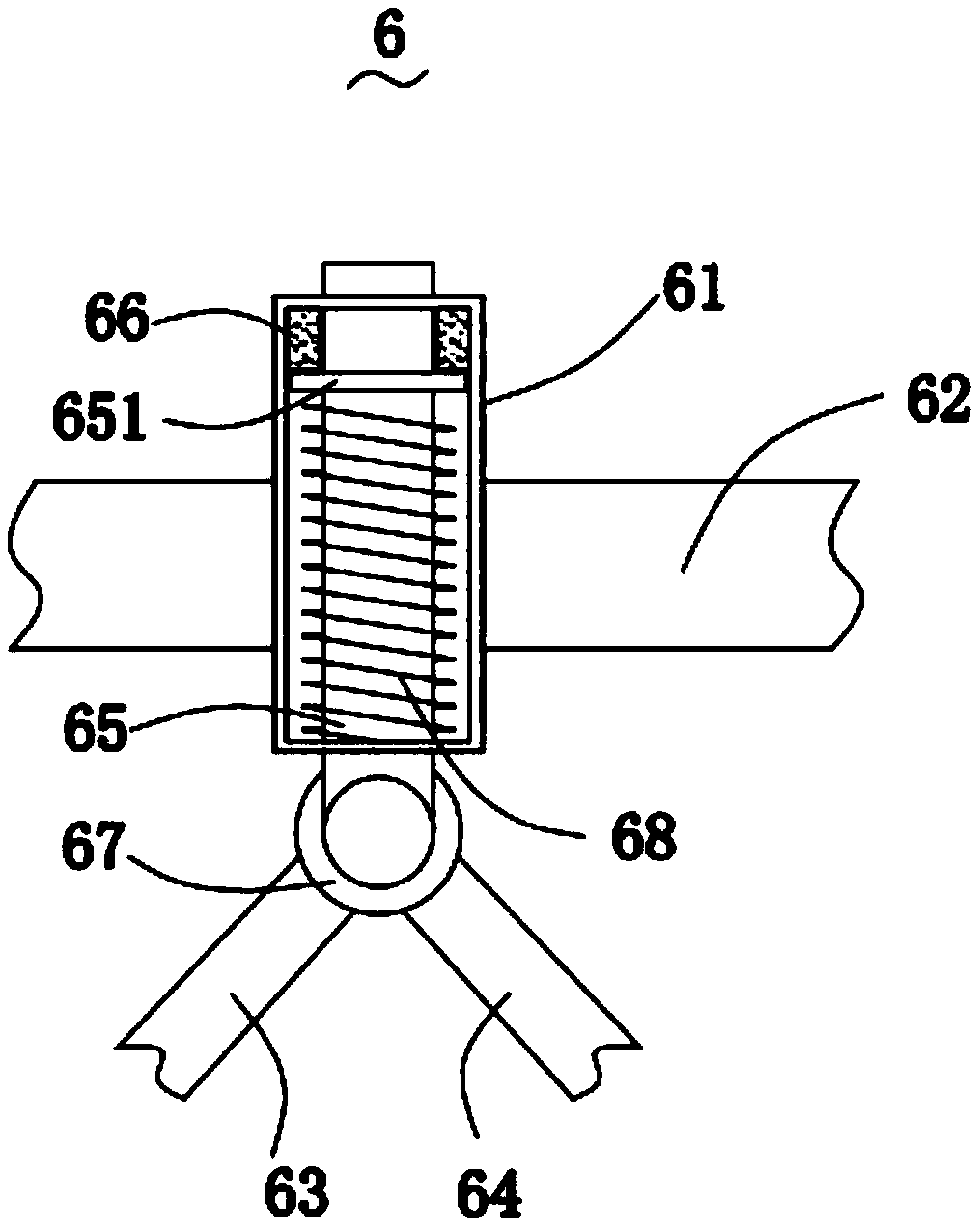
[0030] The first electromagnet 66 is energized, the adsorption pressure plate 651 slides upwards and elongates the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More