

Environment detection method in unmanned vehicle target search system
A detection method and target search technology, applied in the field of environmental detection in the target search system of unmanned vehicles, can solve problems such as immaturity, and achieve the effects of good vehicle tracking, shortening search time, and increasing the probability of detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principle of the present invention.
[0057] A specific embodiment of the present invention discloses an environment detection method in an unmanned vehicle target search system, which realizes autonomous environment detection based on edge area guidance in an unknown environment.
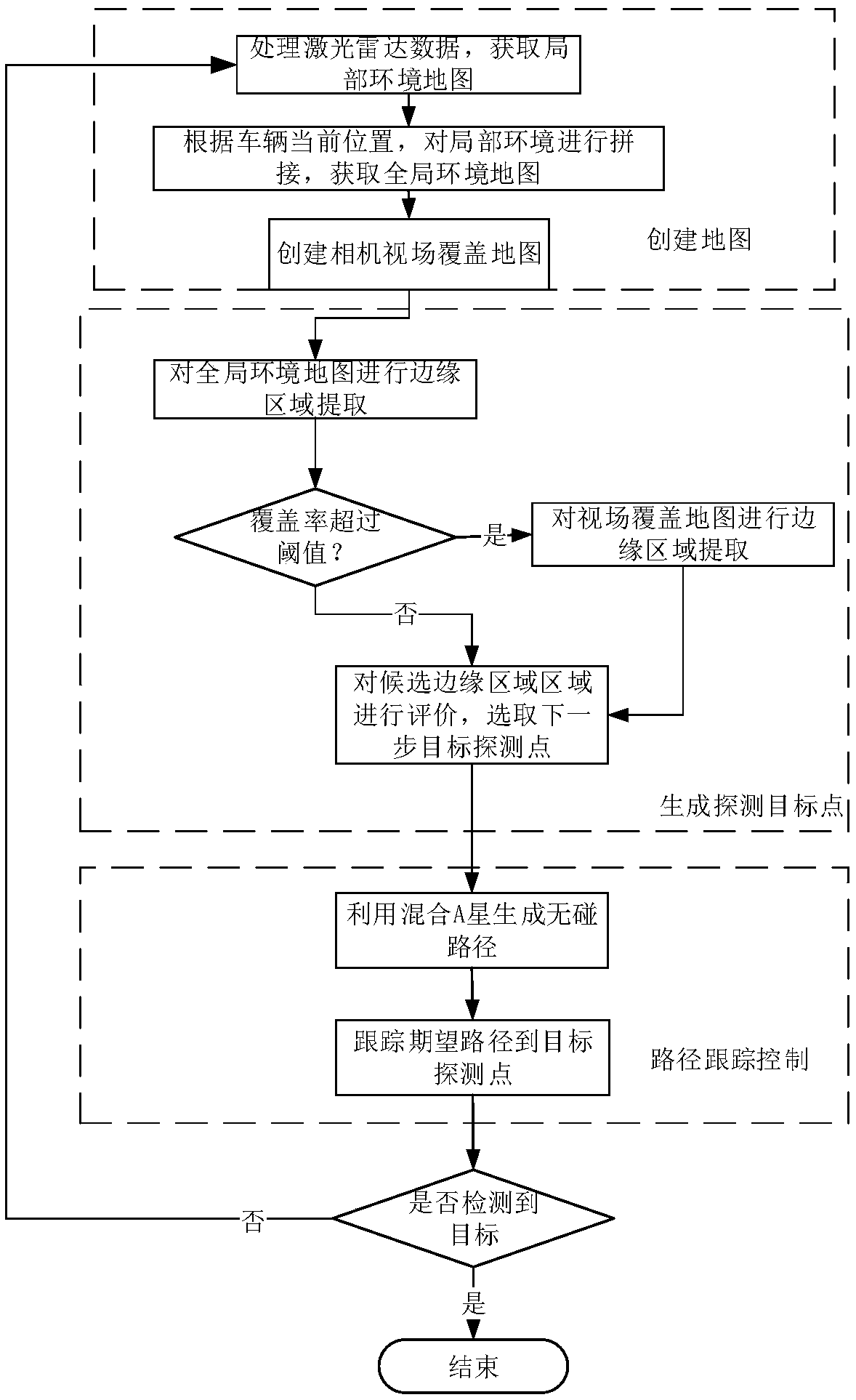
[0058] Such as figure 1 shown, including the following steps:
[0059] Step S1, creating the global environment map of the unmanned vehicle and the field of view coverage map of the vehicle camera;
[0060]Lidar can provide real-time environmental information around the vehicle body, quickly obtain the position information of obstacles in the environment relative to the vehicle body, and can be used to quickly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More