

A Moving Target Tracking Method Based on Switched Kalman Filter
A Kalman filter and moving target technology, applied in the direction of instrumentation, image analysis, calculation, etc., can solve the problem of large tracking error, achieve good robustness, stable tracking effect, and suppress tracking error effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to better understand the present invention, the present invention will be further described below in conjunction with accompanying drawing:
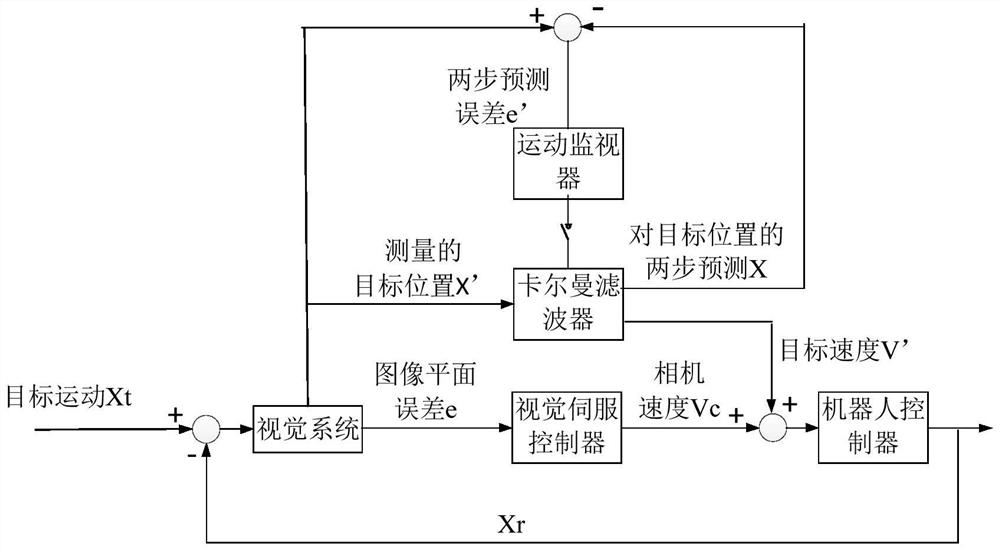
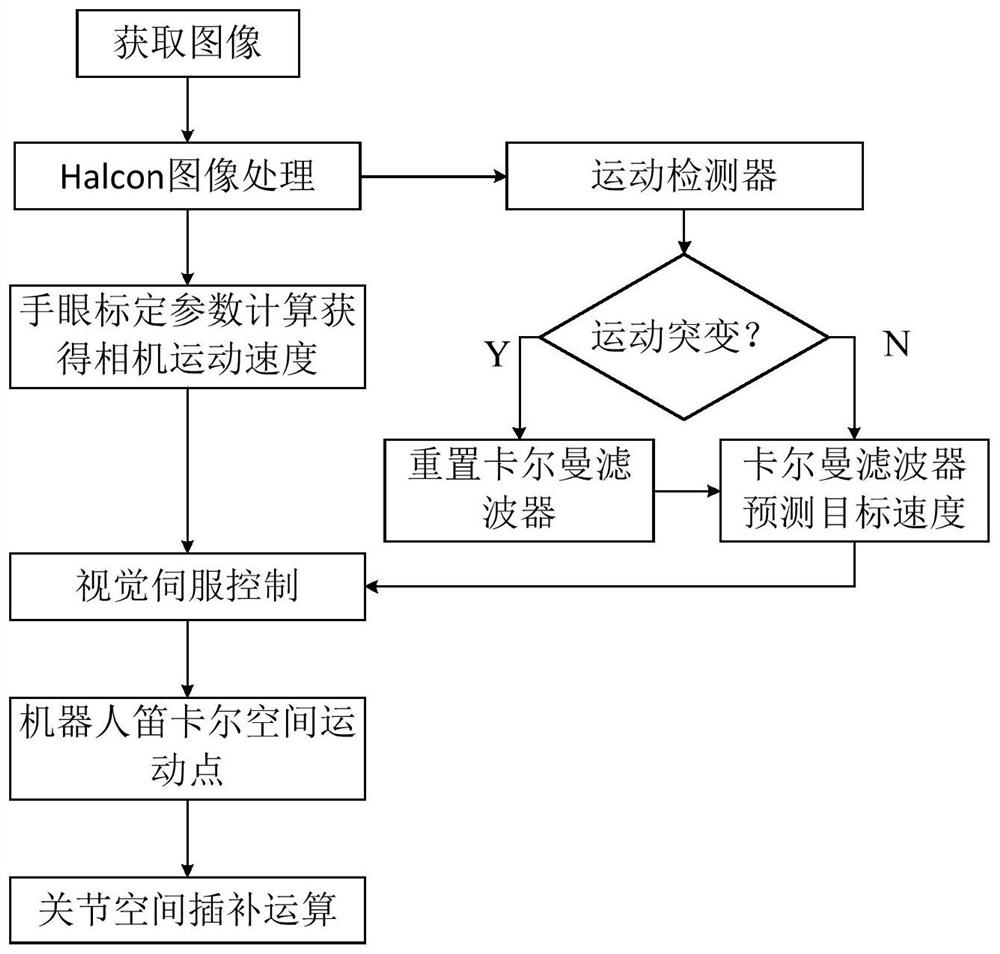
[0074] The present invention is based on the moving target tracking method of the switch Kalman filter, figure 1 It is an algorithm block diagram of the present invention, and the specific implementation steps are as follows:
[0075] Step 1, the vision system collects image information, and obtains the position of the target in the robot coordinate system through template matching and camera projection transformation algorithm;
[0076] Step 2, initialize the state transition matrix, measurement matrix, error covariance matrix, and state iteration error covariance matrix of the Kalman filter;
[0077] Step 3: The Kalman filter estimates the moving speed of the target. If the motion monitor detects a sudden change in the moving state of the target, a switch signal is sent to the Kalman filter to reset the Kalman filter. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More