A monocular depth estimation method, device, terminal and storage medium
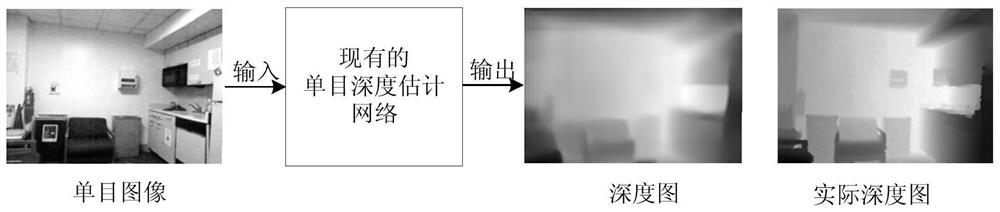
A technology of depth estimation and target depth, applied in the field of computer vision, it can solve problems such as blurred depth map, and achieve the effect of solving edge blurring, sharpening edge boundary, and edge boundary more
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
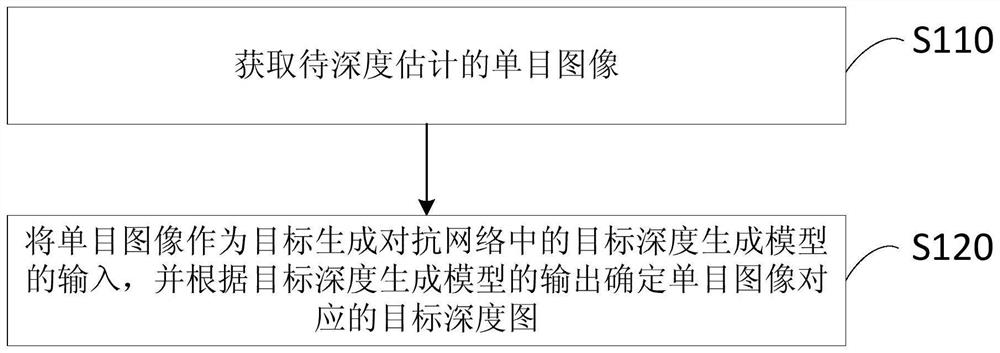
[0030] figure 2 It is a flow chart of a monocular depth estimation method provided by Embodiment 1 of the present invention. This embodiment is applicable to the case of obtaining a high-precision depth map corresponding to a monocular image, especially for smartphones, drones, Scenarios for depth estimation from monocular images in robotics, autonomous driving technology, or augmented reality. The method can be performed by a monocular depth estimation device, which can be implemented by software and / or hardware, and integrated in a terminal that needs to estimate depth, such as drones, robots, smart phones, and the like. The method specifically includes the following steps:
[0031] S110. Acquire a monocular image to be depth estimated.
[0032] Wherein, the monocular image may refer to an image captured by a common camera. Exemplarily, the monocular image may be an RGB color image captured by an RGB (Red Green Blue) camera.
[0033] S120. Use the monocular image as the...
Embodiment 2
[0075] Figure 7 It is a schematic structural diagram of a monocular depth estimation device provided by Embodiment 2 of the present invention. This embodiment is applicable to the case of obtaining a high-precision depth map corresponding to a monocular image. The device specifically includes: a monocular image acquisition module 210 and Target depth map determination module 220;
[0076] Wherein, the monocular image acquisition module 210 is used to acquire the monocular image to be estimated in depth;
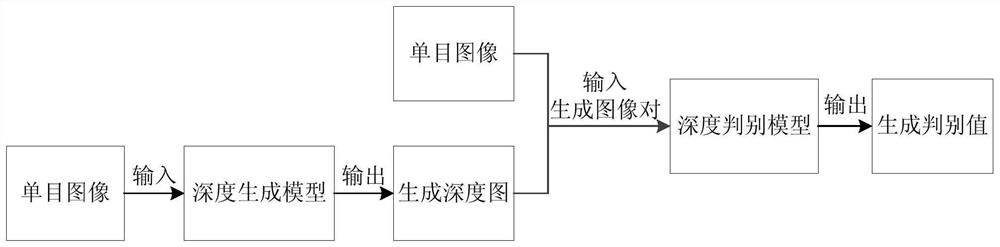
[0077] The target depth map determination module 220 is configured to use the monocular image as the input of the target depth generation model in the target generation confrontation network, and determine the target depth map corresponding to the monocular image according to the output of the target depth generation model, wherein the target depth generation The model is trained according to the deep discriminative model in the target generative adversarial network.
[00...
Embodiment 3
[0119] Figure 8 It is a schematic structural diagram of a terminal provided in Embodiment 3 of the present invention. see Figure 8 , the terminal includes:
[0120] one or more processors 310;
[0121] memory 320, for storing one or more programs;
[0122] The input device 330 is used to collect monocular images;
[0123] an output device 340, configured to display a target depth map;
[0124] When one or more programs are executed by one or more processors 310, so that one or more processors 310 implement the monocular depth estimation method provided by the embodiment of the present invention, including:
[0125] Obtain the monocular image to be estimated in depth;
[0126] The monocular image is used as the input of the target depth generation model in the target generation confrontation network, and the target depth map corresponding to the monocular image is determined according to the output of the target depth generation model, wherein the target depth generatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com