

A 3D Point Cloud Motion Compensation Method
A technology of motion compensation and three-dimensional point cloud, which is applied in the direction of instruments, measuring devices, and utilization of re-radiation, etc., can solve the problems of missing scans in target areas, affecting reconstruction accuracy, performance defects, etc., achieve high compensation accuracy and improve motion compensation accuracy , The effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
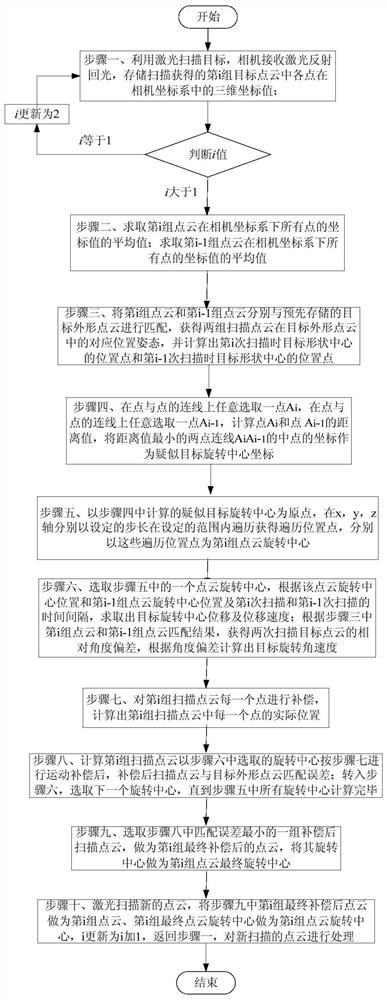
[0044] A kind of three-dimensional point cloud motion compensation method, each step is described in detail below:
[0045] Step 1. Use the laser to scan the target, the camera receives the reflected light from the laser, scans the first group of target point clouds obtained, and stores the three-dimensional coordinate values of each point in the camera coordinate system;
[0046] If it is found that the scanned point cloud is the first group, continue to step 1 to scan the second group of point clouds and store the three-dimensional coordinates; then find that the number of point cloud scans i is 2, greater than 1, go to step 2;
[0047] Step 2. Calculate the average value (10,10,100) of the coordinate values of all points of the second group of point clouds in the camera coordinate system; calculate the average value of the coordinate values of all points of the first group of point clouds in the camera coordinate system ( 16,16,106);
[0048] Step 3. Match the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More