

Branch node type path scheduling method, apparatus, background server and first robot
A background service and scheduling device technology, applied in the field of robots, can solve problems such as robot deadlocks, and achieve the effect of solving deadlocks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
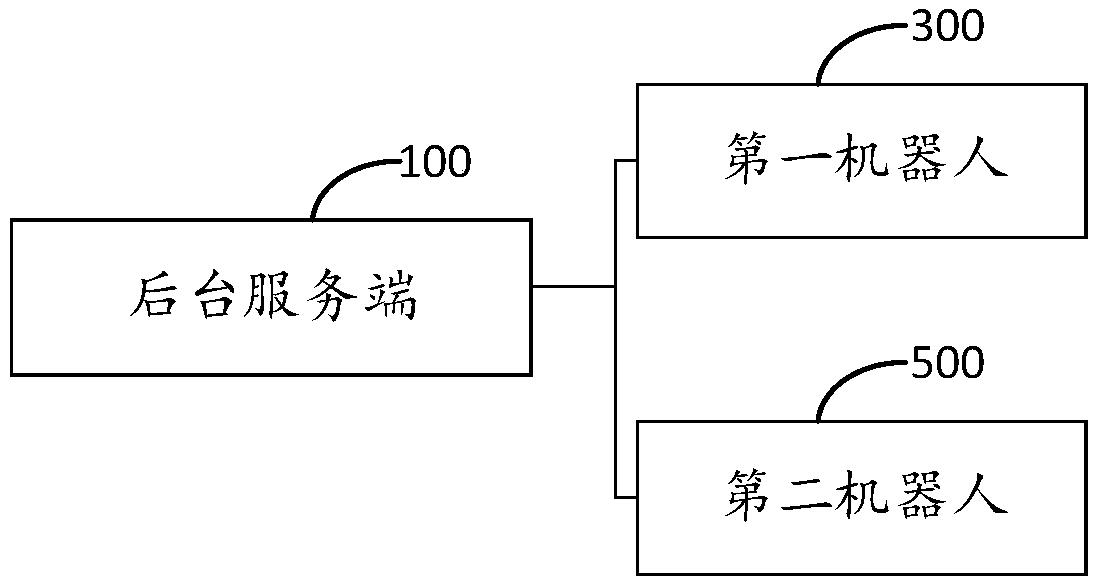
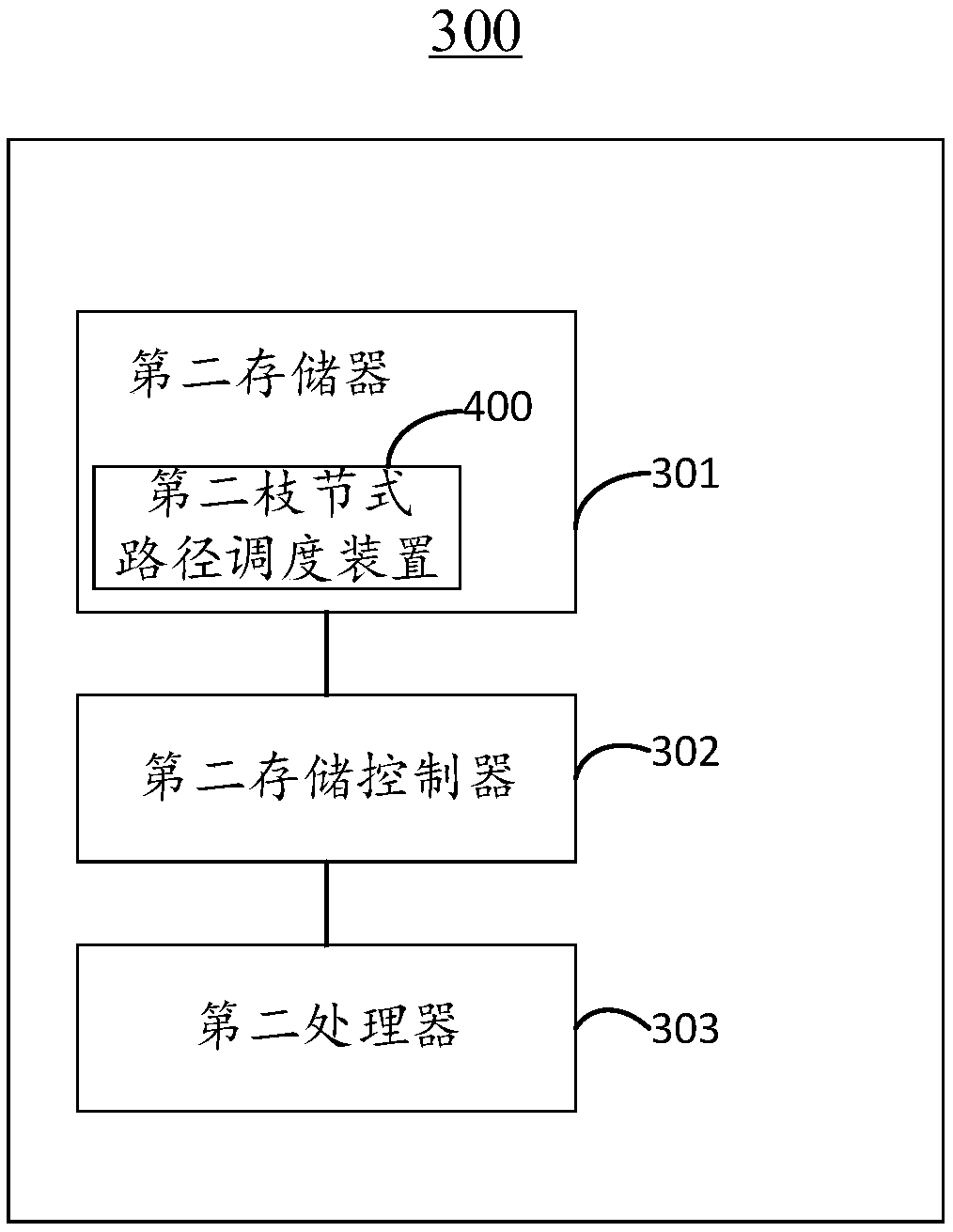
[0038] Please refer to Figure 4 , Figure 4 It shows the flow chart of the branch path scheduling method applied to the background server 100 provided by the embodiment of the present invention. The background server 100 communicates with the first robot 300 and the second robot 500. The branch path includes the main path and the branch path, wherein, the main path and the branch path are connected through a connection point, and there are multiple task points arranged within the preset range of the main path and the branch path, and the first robot 300 or the second robot 500 can reach the preset path through the main path and the branch path. Mission points to complete preset missions. When the first robot 300 or the second robot 500 moves on the main path, it moves in one direction in sequence, that is, on the main path, the first robot 300 and the second robot 500 or any two second robots 500 will not meet head-on , and the first robot 300 in the back will not avoid the...
no. 2 example
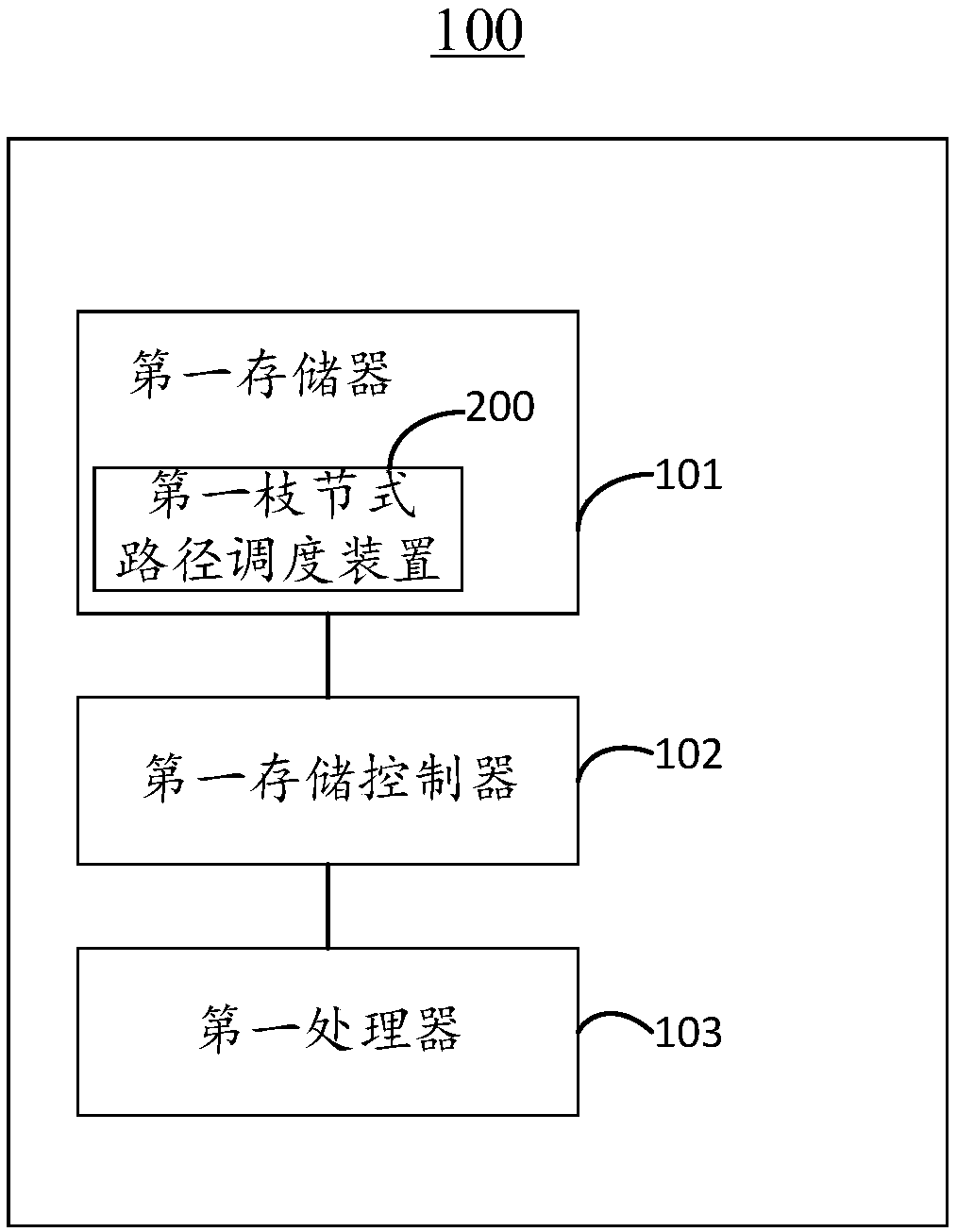
[0074] Please refer to Figure 9 , Figure 9 A schematic block diagram of the first branch path scheduling apparatus 200 provided by the embodiment of the present invention is shown. The first branch path scheduling device 200 is applied to the background server 100 and includes a first receiving module 201 ; a judgment module 202 ; a waiting module 203 ; and a first avoidance module 204 .
[0075] The first receiving module 201 is configured to receive an obstacle handling request sent by the first robot, wherein the obstacle handling request is generated when the first robot encounters an obstacle.
[0076] In the embodiment of the present invention, the first receiving module 201 is configured to execute step S101.
[0077] The judging module 202 is configured to judge whether the obstacle is the second robot based on the obstacle processing request.
[0078]In the embodiment of the present invention, the judging module 202 is configured to execute step S102 and its sub-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More