

Path planning method based on multi-agent enhanced learning
A technology of reinforcement learning and path planning, applied in the field of aircraft, can solve the problems of reinforcement learning dimension disaster, affecting learning speed, etc., and achieve the effect of improving survival rate and mission completion rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
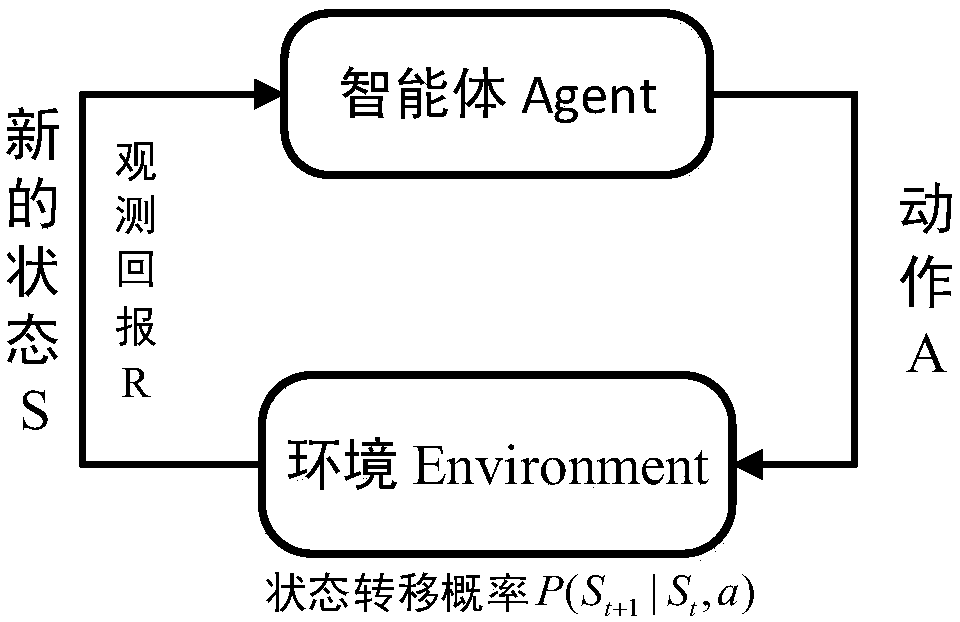
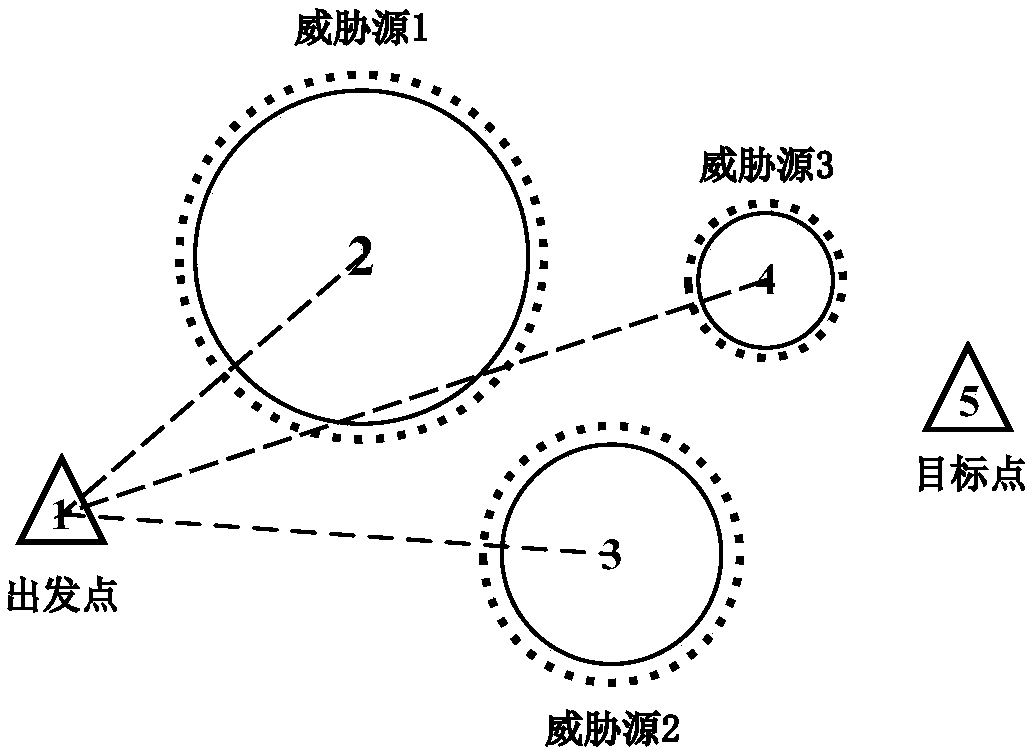
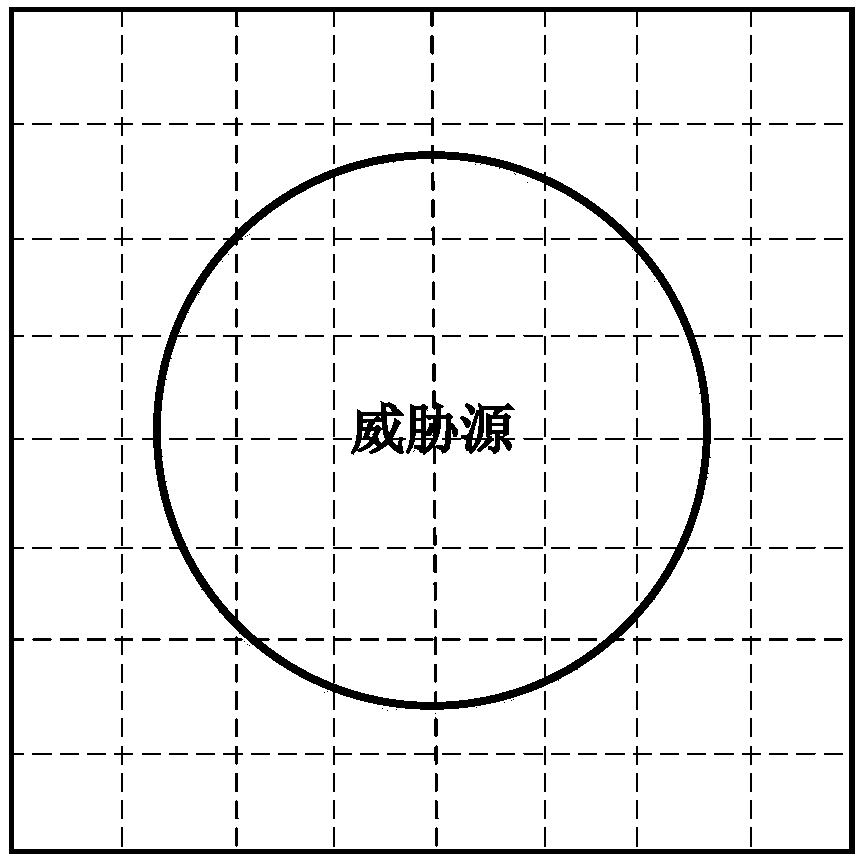
[0055] The present invention proposes a path planning method based on multi-agent reinforcement learning, and the problem considered is how to find a safe path from a certain point to a target point. First, define two kinds of agents with different but complementary functions for global path planning and local path planning. To solve the problem of dimension explosion in reinforcement learning, the flight area is divided into global and local states. The global state includes the starting point, The end point and different threat sources, the local state is the specific position of the aircraft when it reaches a certain global state; define the reward matrix of the global agent and initialize the global state transition table; then, according to the global state transition table, in all global states The initial state of the aircraft is randomly initi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More