

Multi-mobile robot control system based on following pilot formation
A technology for mobile robots and following robots, applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., to achieve the effects of reduced dependence, small error accuracy, and simple and practical control strategies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
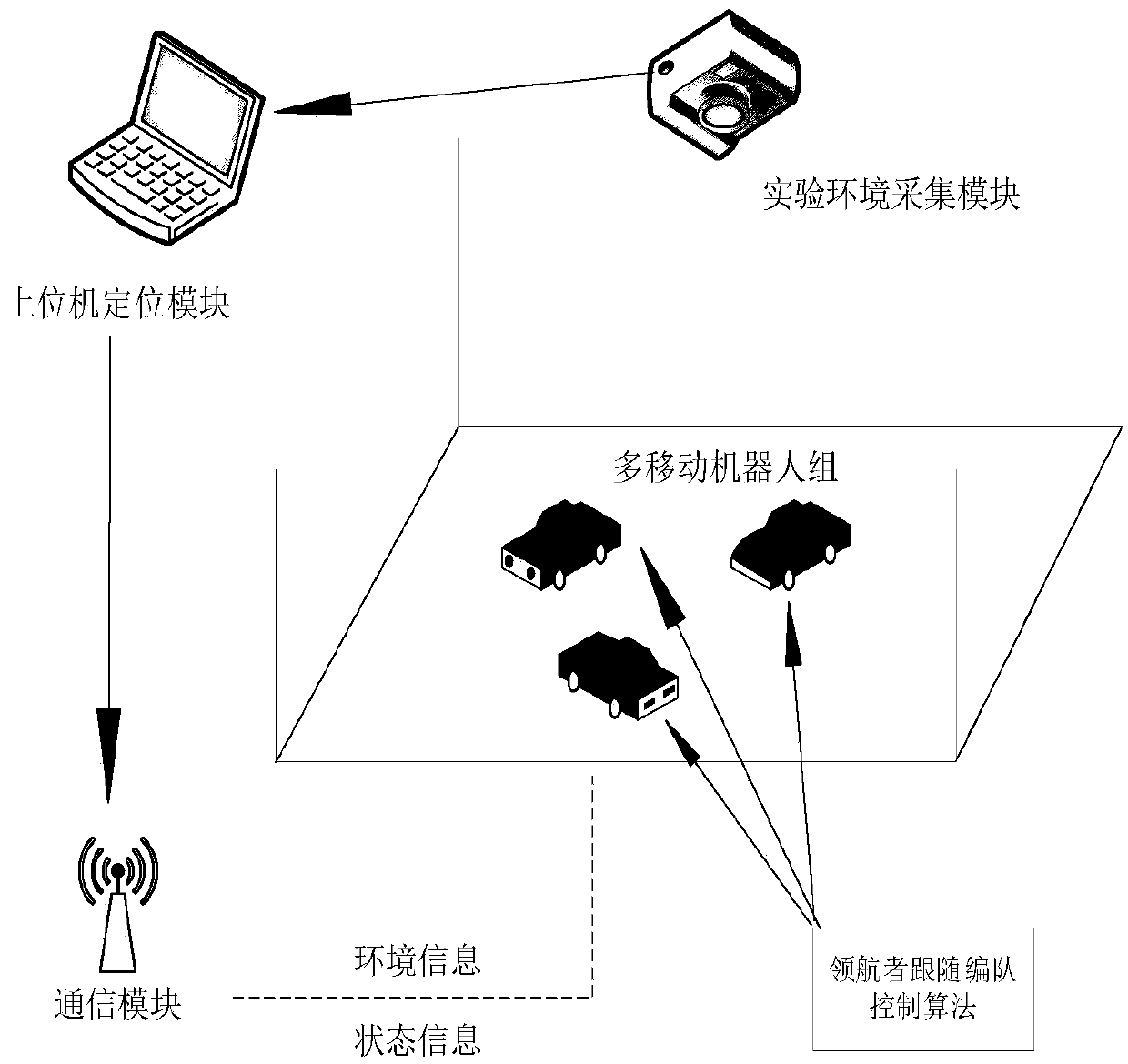
[0051] combine figure 1 , the multi-mobile robot control system based on following the navigator formation in the embodiment of the present invention includes an experimental environment image acquisition module, a host computer positioning module, a vehicle-type mobile robot group, a communication module, and a control algorithm module, wherein:
[0052] The experimental environment image acquisition module is used to collect video images of a plurality of mobile robot formation experimental environments;
[0053] The positioning module of the upper computer uses an image processing algorithm to calculate the absolute position information of each robot in real time through the coordinate system calibrated by the camera;
[0054] The car-type mobile robot group is composed of a plurality of single mobile cars, and independently decides to complete the formation task;
[0055] The communication module performs data interaction and information sharing through wireless communica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More