

Five-joint robot and control method thereof
A control method and robot technology, applied in the field of robots, can solve the problems of high cost and low flexibility of robots, and achieve the effect of small resources, fast calculation speed, and flexible space operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the objectives, technical solutions and advantages of the present invention clearer and clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
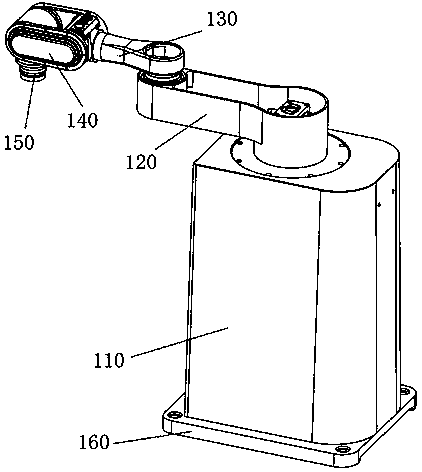
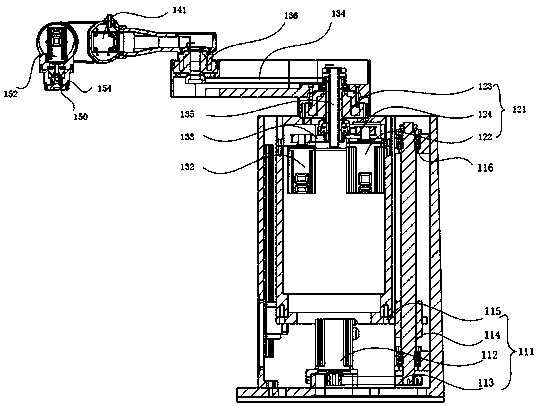
[0044] Such as figure 2 As shown in this embodiment, a five-joint robot is provided in this embodiment. The robot includes four manipulator arms connected in sequence and a joint assembly for driving the manipulator arms. The robot mainly includes five joint movements, namely: vertical movement , Horizontal plane rotation, horizontal plane rotation, vertical plane rotation, axial rotation. The second and third joints in this way only need to rotate in the horizontal plane, and the lifting movement of the first joint cooperates with the vertical rotation of the fourth joint to ach...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More