Reinforcement mesh grabbing control method based on visual recognition
A steel mesh and visual recognition technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of increasing manual labor and increasing the selection cycle, so as to improve production efficiency, reduce uncertain injuries, and automate transfer and online effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below with reference to the accompanying drawings. The description in this part is only exemplary and explanatory, and should not have any limiting effect on the protection scope of the present invention. In addition, according to the description in this document, those skilled in the art can make corresponding combinations of features in the embodiments in this document and in different embodiments.
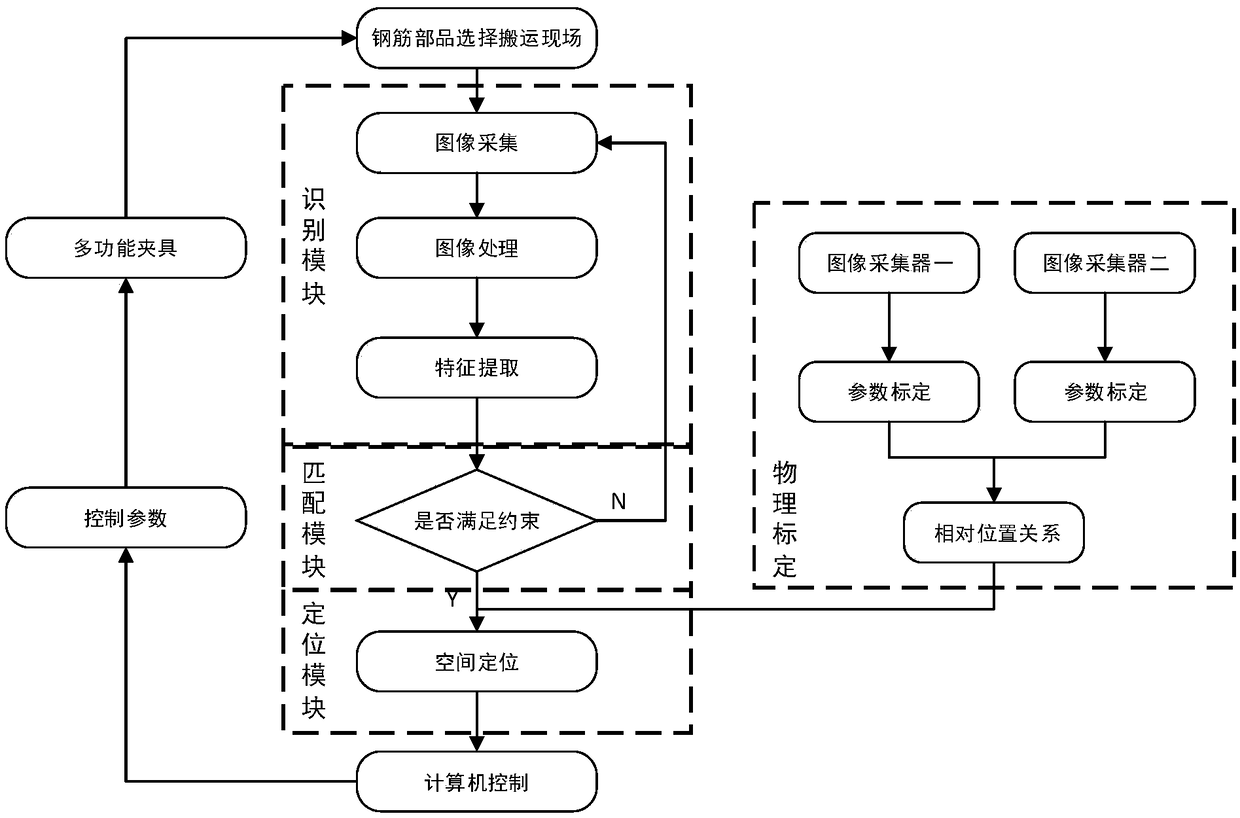
[0038] Examples of the present invention are as follows, such as figure 1 , a visual recognition-based grasping control method for steel mesh, comprising the following steps:
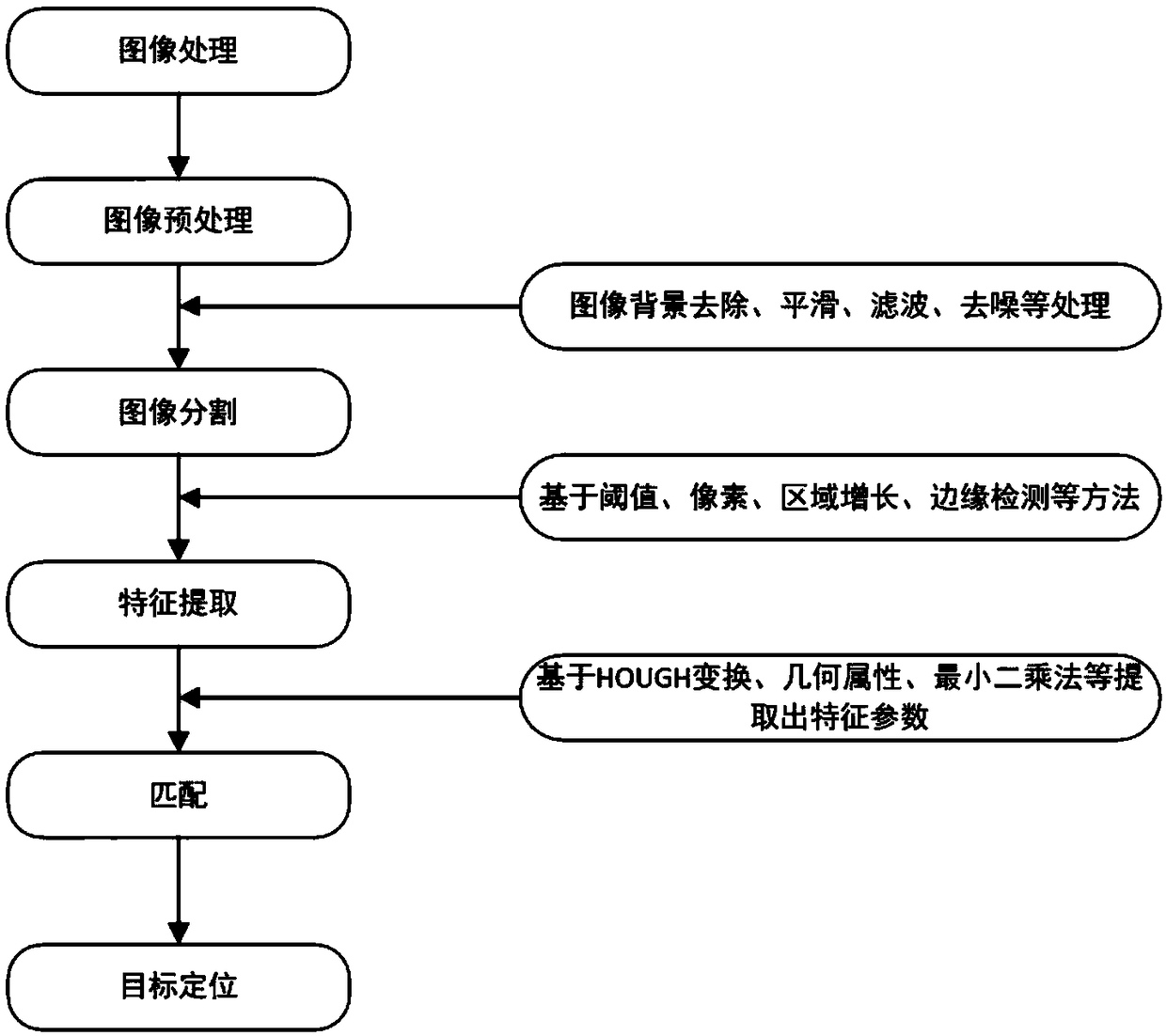
[0039] (1) Image acquisition and image processing: acquire the image of the material to be grabbed and perform storage analysis and preprocessing;
[0040] (2) Extraction of material features: The material image collected in step (1) and processed by the image will include the overall size of the steel mesh, the size of the mesh, whether or not to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com