

One-way path scheduling method and system
A dispatching method and dispatching system technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the impact of human activities, mutual interference of robots, and occupation of human activity space, so as to reduce the impact of human activities and avoid mutual interference Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0026] Please refer to Figure 4 , Figure 4 It is a flowchart of a one-way path scheduling method provided by a preferred embodiment of the present invention. The above-mentioned one-way path scheduling method includes the following steps:
[0027] Step S101 , a first robot located in a scheduling area and in an idle state sends a task request to the server 100 .
[0028] In the embodiment of the present invention, when the first robot enters an idle state and recognizes that its current location belongs to a pre-divided scheduling area, it sends a task request to the server 100 .
[0029] Step S102, the server 100 assigns target task information to the first robot from the task list information based on the received task request.
[0030]In the embodiment of the present invention, task list information is preset in the server 100, and the task list information includes a plurality of task information. Each piece of task information includes an operation task correspondin...
no. 2 example
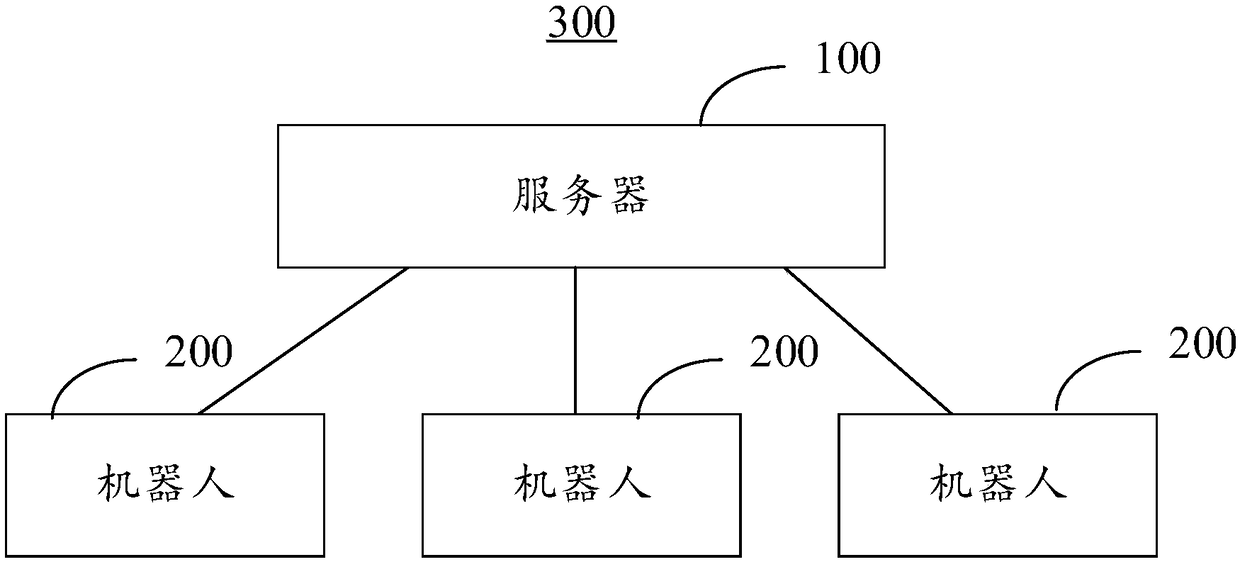
[0054] like figure 1 As shown, a one-way path scheduling system 300 provided by a preferred embodiment of the present invention may include: a server 100 and a plurality of robots 200, and the server 100 is connected to the plurality of robots 200 in communication. Multiple unidirectional paths and task list information are pre-stored in the server 100, each of which includes at least one task location point, and the unidirectional path scheduling method includes:
[0055] The first robot is configured to send a task request to the server 100 when placed in the scheduling area and in an idle state.
[0056] The server 100 is configured to assign target task information to the first robot from the task list information based on the received task request; wherein, the target task information includes moving from the scheduling area to the target The first moving task of the task location point, the second moving task moving from the target task location point to the dispatching...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More