

Dynamic avoidance method for multiple robots in collaborative operation
A multi-robot, robot technology, applied in the field of dynamic avoidance, can solve problems such as difficulty, no solution, multi-robot late
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0077] Embodiment 1 describes a multi-robot collaborative operation system, which includes a hardware part and a software part.
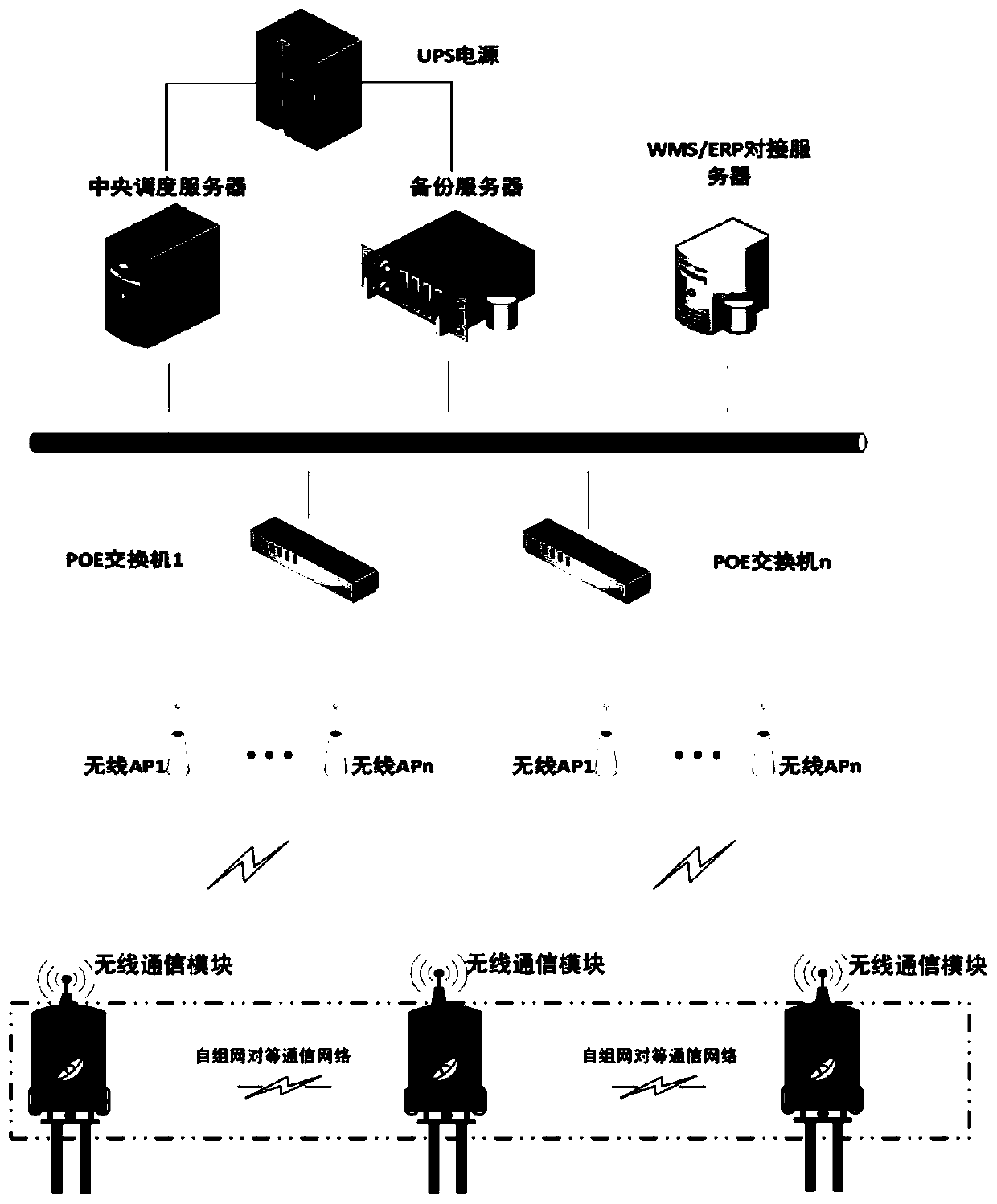
[0078] combine figure 1 As shown, the hardware part includes a server (computer) and multiple robots (executive bodies).
[0079] The server is used for resource management of the entire scheduling system, receiving external tasks, performing logical operations and sending scheduling instructions.
[0080] Robots include but are not limited to planar handling robots, such as forklift robots, AGVs, etc.
[0081] In addition, the multi-robot collaborative operation system also includes two communication links, one of which is a global communication link, and the other is a local communication link between two robots, that is, an ad hoc peer-to-peer communication network.
[0082] The global communication link is used for global scheduling based on the stopping point mechanism under normal conditions, and the peer-to-peer communication network of the...
Embodiment 2
[0109] Embodiment 2 describes a method for dynamic avoidance of multiple robots during collaborative operation, which is implemented based on the multi-robot collaborative operation system in Embodiment 1 above.
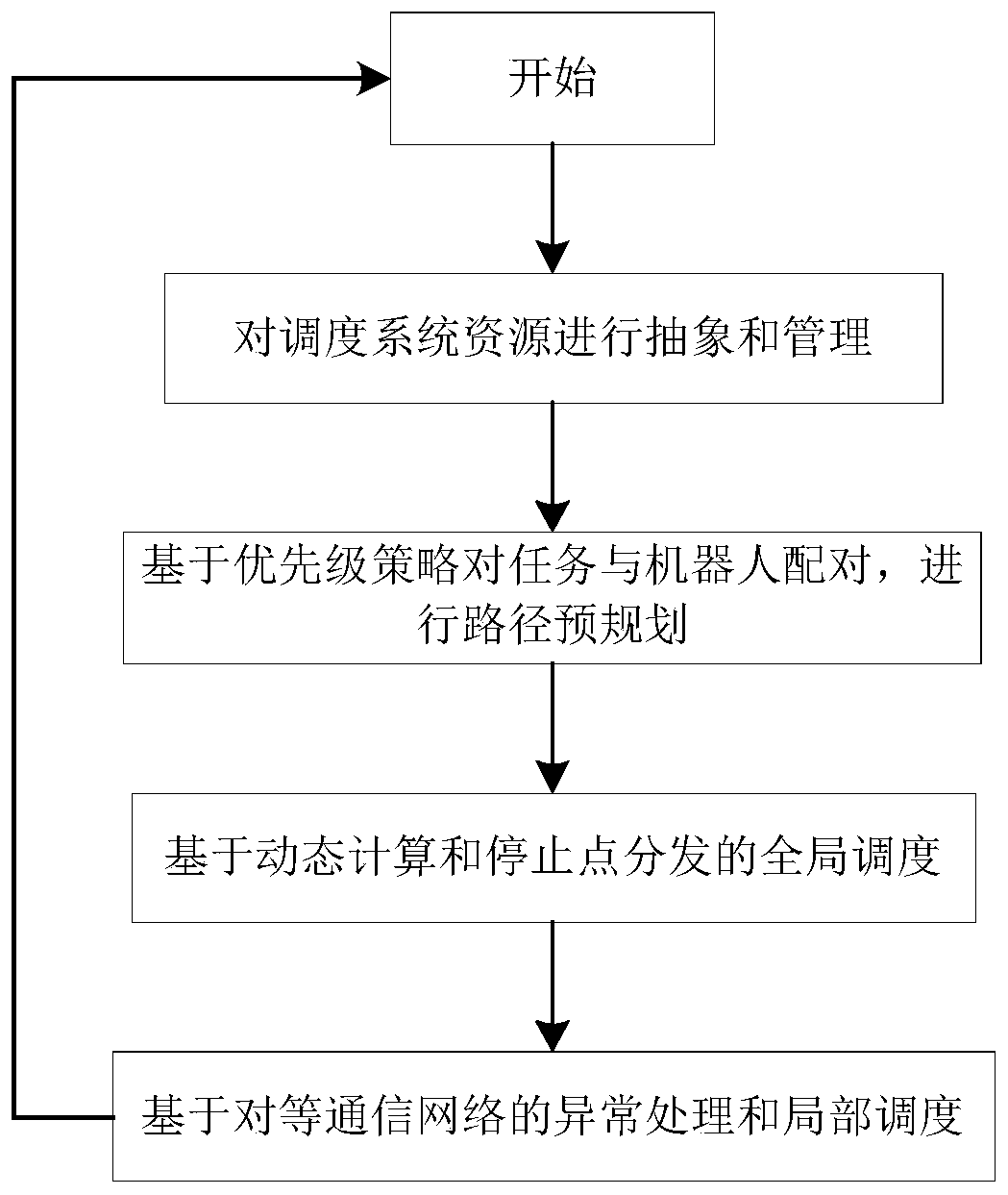
[0110] Such as image 3 As shown, a dynamic avoidance method for multi-robots during collaborative operations includes the following steps:
[0111] Step 1: The server side (central scheduling server) abstracts and manages scheduling resources.
[0112] Scheduling system resources include running scenarios, robot walking paths, and current running status information of all robots.
[0113] I. Abstract the topological frame of the operating scene, perform an abstract summary of the overall operating scene according to the on-site operating space and the deployment status of the workstations, and extract the topological frame diagram of the operating scene. Typical topologies supported in this embodiment include checkerboard topology, U-shaped crossover topology, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More