A dynamic avoidance method for multi-robots in cooperative operation
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A multi-robot and robot technology, applied in the field of dynamic avoidance, can solve problems such as difficulty, no solution, and multi-robot delay
Active Publication Date: 2020-06-02
青岛海通胜行智能科技有限公司
View PDF14 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
At present, most domestic robot manufacturers are in the early stage of development, and the avoidance and scheduling research of multi-robots started relatively late, and due to the difficulty and complexity of avoidance and algorithm implementation, most manufacturers do not have mature, reliable and efficient solutions
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
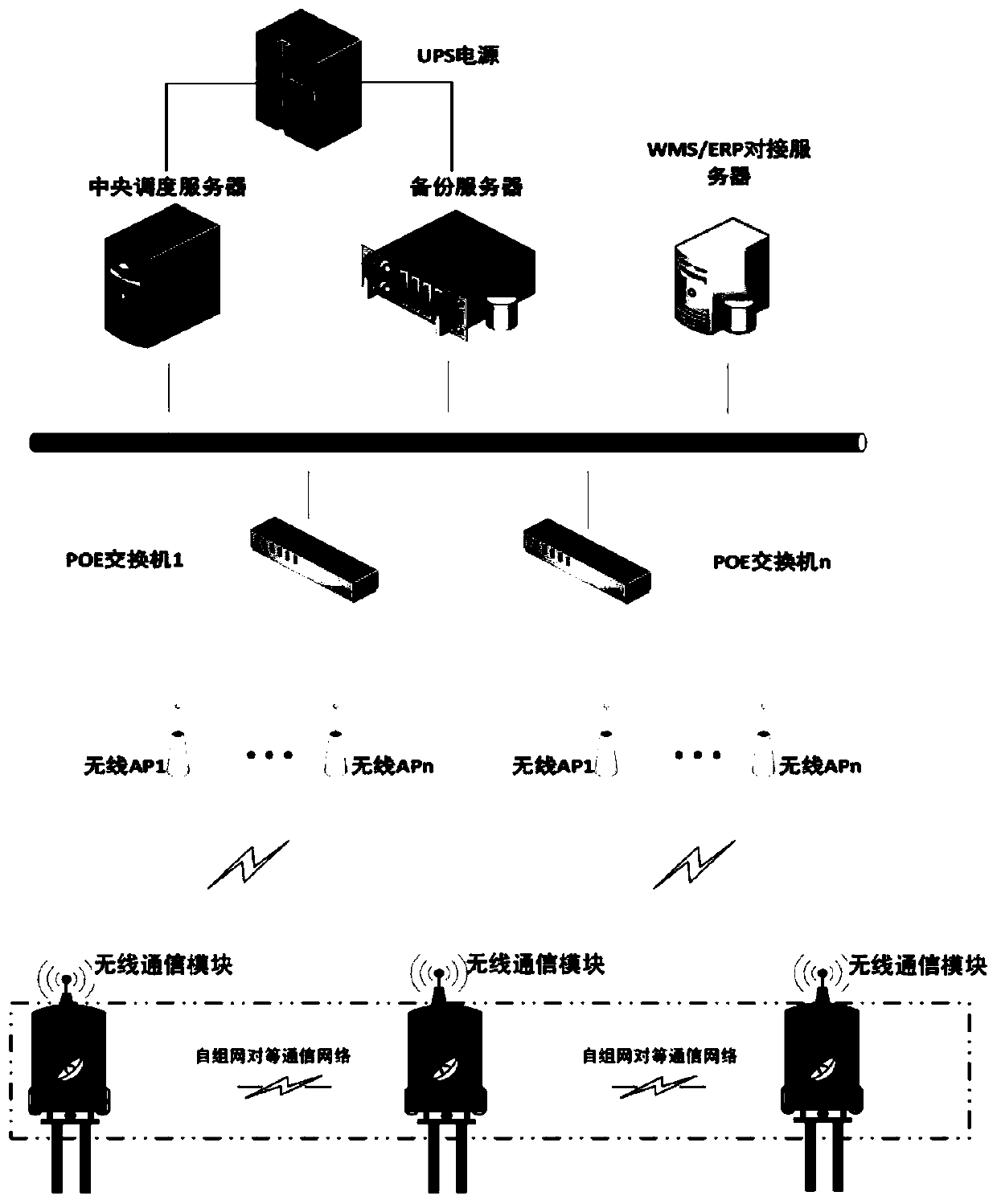
[0077] Embodiment 1 describes a multi-robot collaborative operation system, which includes a hardware part and a software part.
[0078] combine figure 1 As shown, the hardware part includes a server (computer) and multiple robots (executive bodies).
[0079] The server is used for resource management of the entire scheduling system, receiving external tasks, performing logical operations and sending scheduling instructions.
[0080] Robots include but are not limited to planar handling robots, such as forklift robots, AGVs, etc.
[0081] In addition, the multi-robot collaborative operation system also includes two communication links, one of which is a global communication link, and the other is a local communication link between two robots, that is, an ad hoc peer-to-peer communication network.
[0082] The global communication link is used for global scheduling based on the stopping point mechanism under normal conditions, and the peer-to-peer communication network of the...
Embodiment 2
[0109] Embodiment 2 describes a method for dynamic avoidance of multiple robots during collaborative operation, which is implemented based on the multi-robot collaborative operation system in Embodiment 1 above.
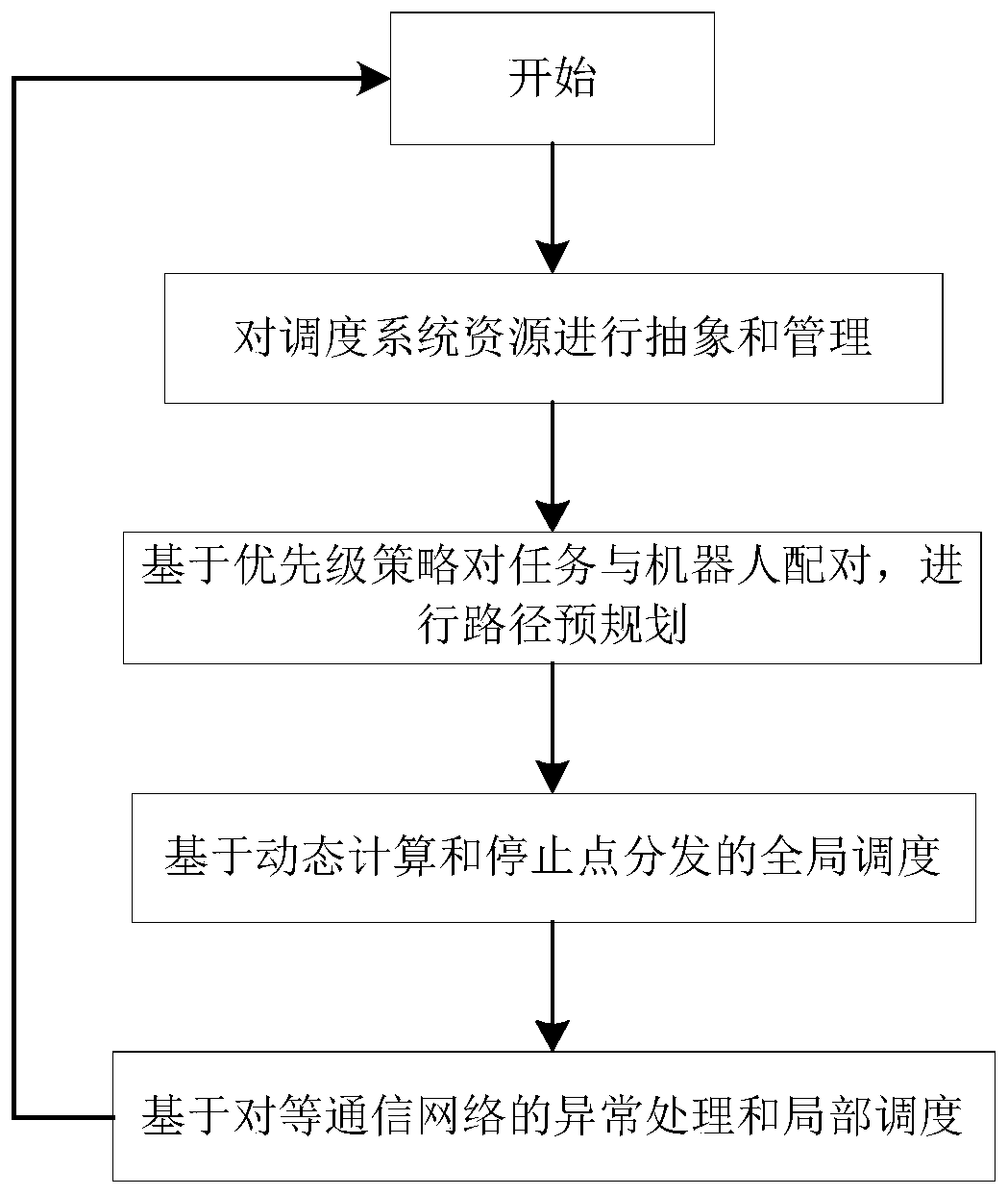
[0110] Such as image 3 As shown, a dynamic avoidance method for multi-robots during collaborative operations includes the following steps:
[0111] Step 1: The server side (central scheduling server) abstracts and manages scheduling resources.
[0112] Scheduling system resources include running scenarios, robot walking paths, and current running status information of all robots.
[0113] I. Abstract the topological frame of the operating scene, perform an abstract summary of the overall operating scene according to the on-site operating space and the deployment status of the workstations, and extract the topological frame diagram of the operating scene. Typical topologies supported in this embodiment include checkerboard topology, U-shaped crossover topology, and...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a dynamic avoidance method for multiple robots in collaborative operation. The method comprises the steps: carrying out the path pre-planning of all tasks in a task pool according to the priorities, and reducing the conflict intervention between robots from a planning layer; monitoring the current operation states of all the robots, dynamically pre-judging the safety distance, generating different types of stop points, coordinating the operation of the robots, and solving the technical problems of collision, delay, interlocking and the like during the cooperative operation of the robots. Overall scheduling is carried out to optimize resource distribution, traffic control and coordinated avoidance are achieved, local peer-to-peer communication solves the overall operation problem after the robot individual is abnormal, and therefore the robustness of the whole scheduling system is guaranteed. The method is suitable for multi-robot scheduling avoidance scenes suchas factory automation and storage commodity transfer.
Description
technical field [0001] The invention relates to a dynamic avoidance method of multi-robots during cooperative operation. Background technique [0002] In the environment of rapid development of logistics, industrial production and warehousing, more and more companies are accelerating the process of unmanned warehousing. With the increasing demand for warehousing scenarios, a warehousing usually requires several, dozens, or even more multitasking robot. This puts forward higher requirements for avoidance in the same scene. At present, most domestic robot manufacturers are in the early stage of development, and the avoidance and scheduling research of multi-robots started relatively late. Due to the difficulty and complexity of avoidance and algorithm implementation, most manufacturers do not have mature, reliable and efficient solutions. With the development of the market, it is urgent to solve the dynamic avoidance problem of multi-robots. Contents of the invention [0...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More