

A point cloud stitching method for flat parts based on multi-dimensional space invariant features
A point cloud stitching and multi-dimensional space technology, applied in image analysis, image enhancement, instruments, etc., can solve the problems of point cloud surface information less, poor operation flexibility, poor stability, etc., to avoid too few feature points and improve recognition , the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with figures and examples.
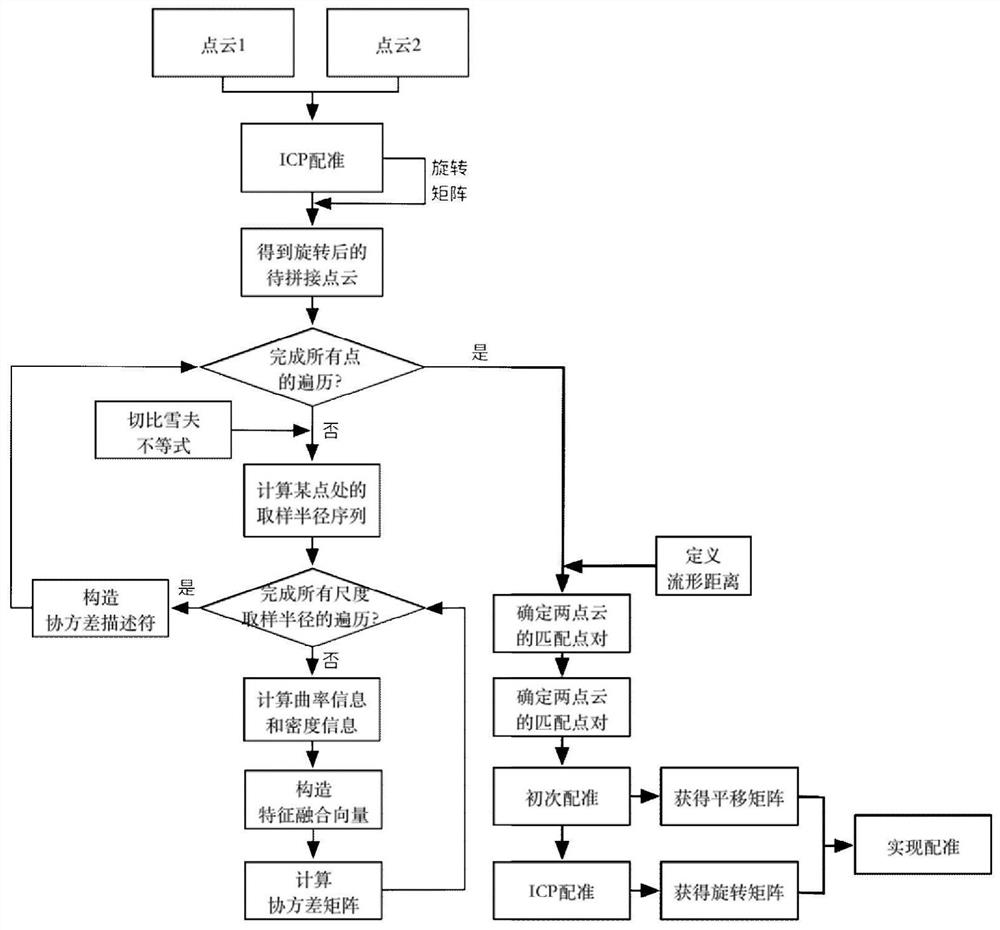
[0073] For the point clouds to be spliced of two plate-shaped mechanical parts with hole features, the embodiment implemented according to the complete method of the present invention adopts the following steps to splice:
[0074] Step 1: Use the nearest neighbor iterative algorithm to calculate the point cloud rotation matrix, and use the rotation matrix to transform the spatial position of the point cloud to be stitched, and use the transformed point cloud to provide an initial value for subsequent stitching. Thus, two initial point clouds are obtained, one of which is the point cloud to be stitched after space transformation, and the other initial point cloud is another point cloud to be stitched without space transformation.
[0075] The rotation matrix R obtained in step 1 1 for:
[0076]
[0077] Step 2: According to Chebyshev's inequality, under the premise of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More