

An indoor collaborative positioning method based on spatial analysis
A collaborative positioning and spatial analysis technology, applied in location information-based services, specific environment-based services, wireless communications, etc., can solve the problem of non-line-of-sight cooperative positioning partitions that cannot be positioned, so as to avoid the reduction of positioning accuracy and improve Effects of Ray Tracing Efficiency and Positioning Accuracy Improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
[0058] An indoor collaborative positioning method based on spatial analysis, comprising the following steps:
[0059] (1) Utilize the improved ray tracing algorithm oriented to positioning space analysis, preprocess the fixed reference point position in the space and the image point information in the space, and establish the reflection surface filter set method;
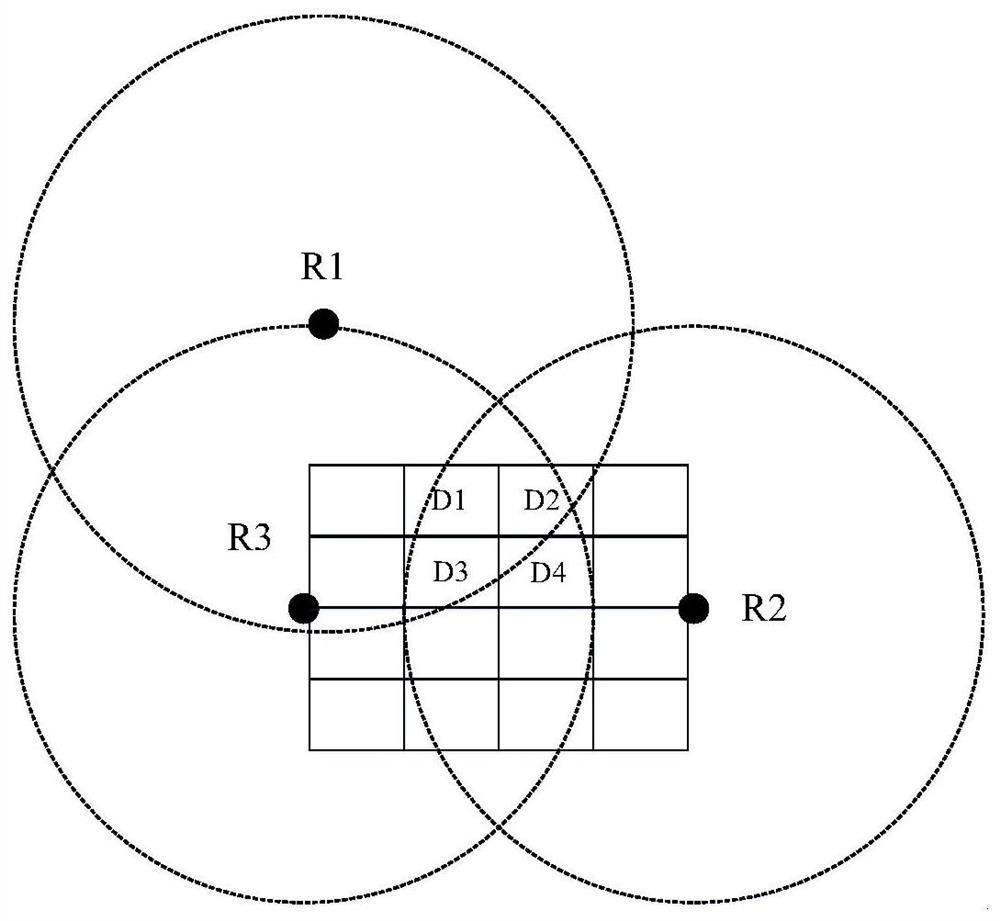
[0060] (2) Use the indoor space area determination algorithm based on improved ray tracing technology to determine whether a certain area in the space meets the required number of line-of-sight paths, and distinguish between direct positioning partitions and cooperative positioning partitions;
[0061] (3) Utilize the two-stage cooperative positioning algorithm based on spatial analysis. In the first stage, the target node receives the positioning signals of all reference points, perfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More