

High-adaptability feedback mechanical finger
An adaptable and feedback technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of low sensitivity, large volume, easy to accidentally touch, etc., and achieve the effect of high sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
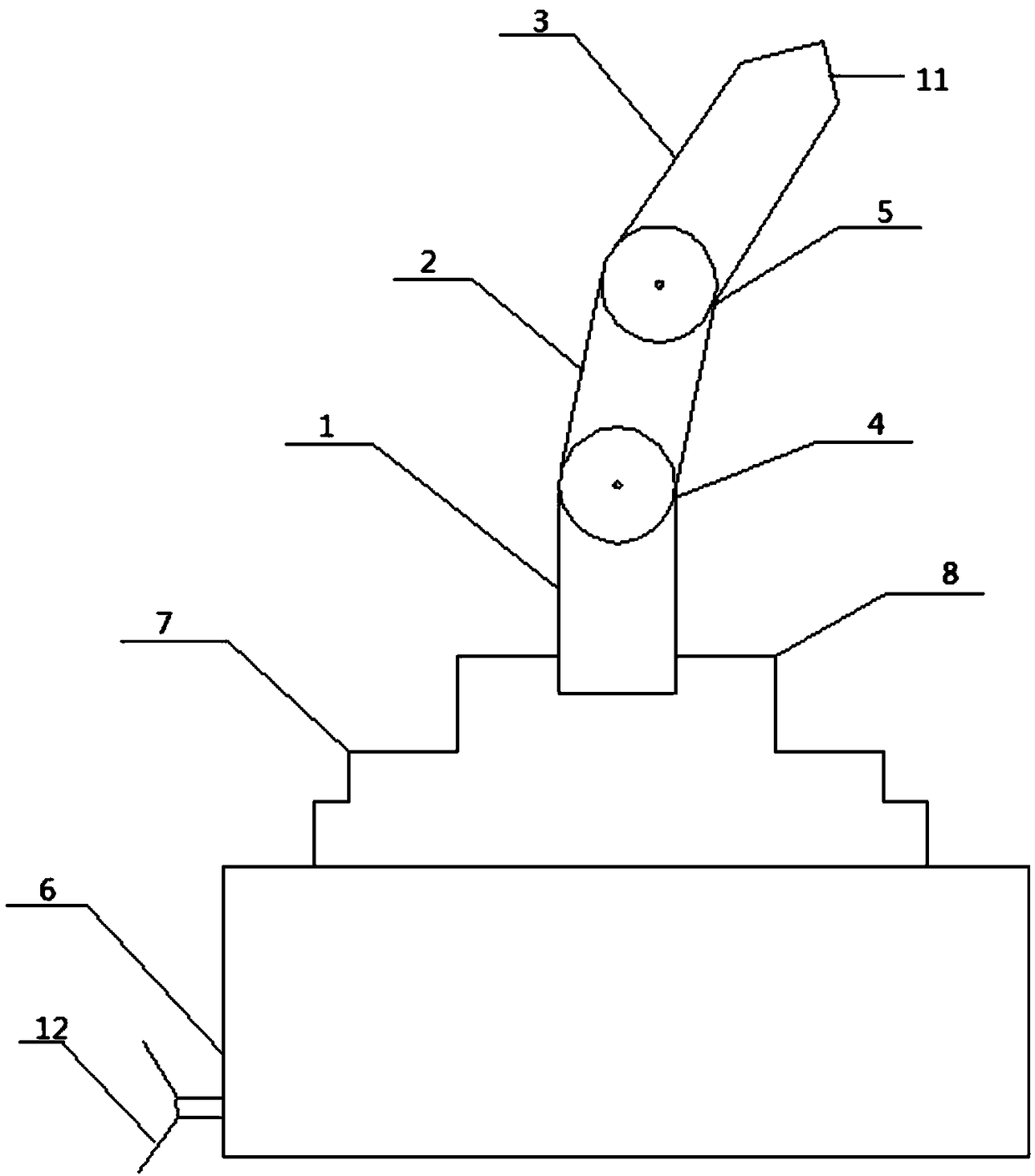
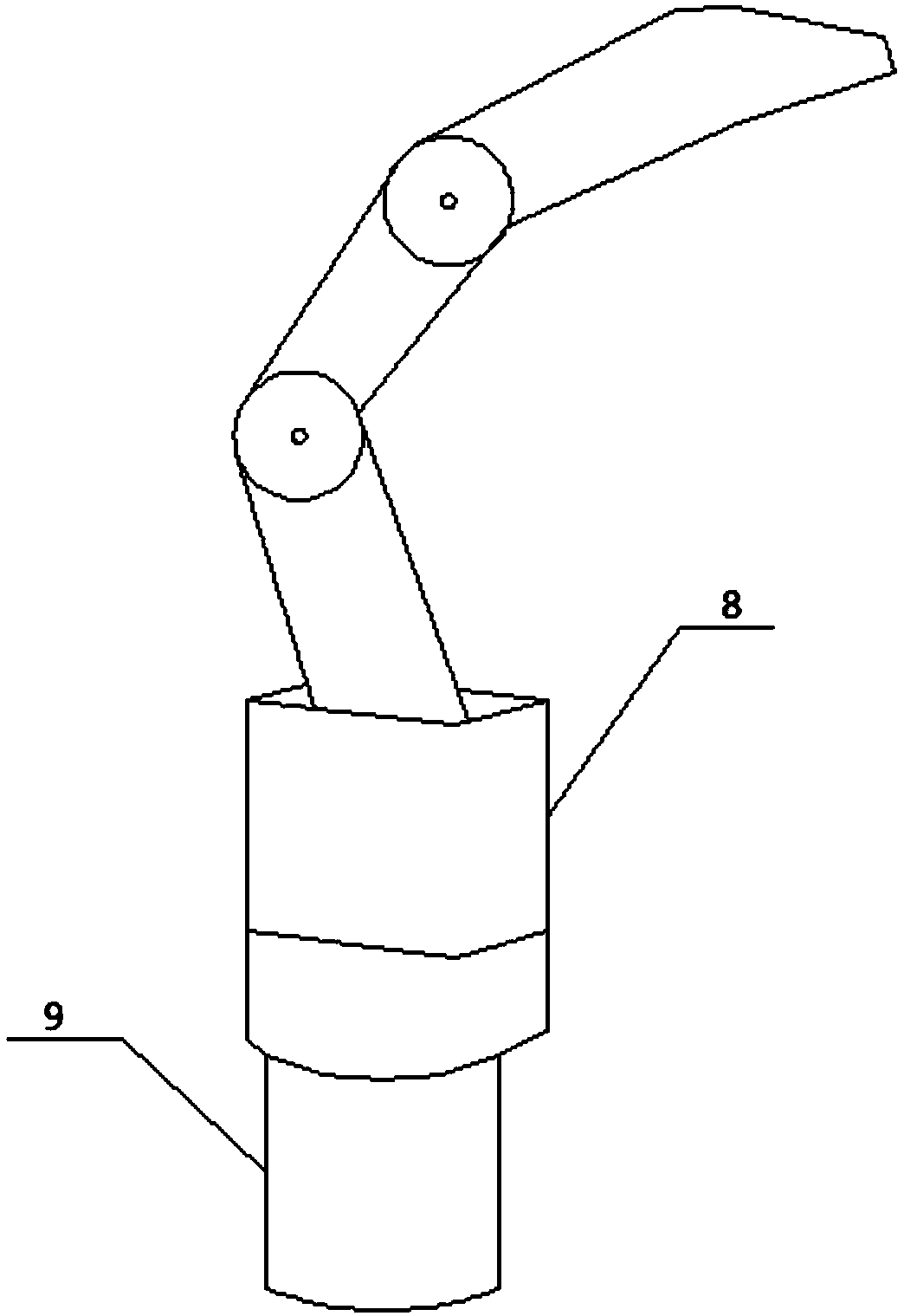
[0027] Such as Figure 1-3 , the present embodiment provides a highly adaptable feedback robot finger, which can be widely used in occasions that need to simulate finger stretching movements, such as key operations on various devices. Through the telescopic mode setting of the robot finger, it can be adapted to various types of switches with or without locks.
[0028] It includes a robot finger, a retractable clamp and a control device; the robot finger includes a terminal knuckle 1, a middle knuckle 2, a head knuckle 3, and a universal joint, and the terminal knuckle 1 and the middle knuckle 2 pass through a universal joint. Joint one 4 is connected, the middle knuckle 2 and the first knuckle 3 are connected by universal joint two 5, the universal joint is a universal movable head, which can be freely stretched and rotated, through the adjustment of the universal joint, the fingers can be pointed to required position.
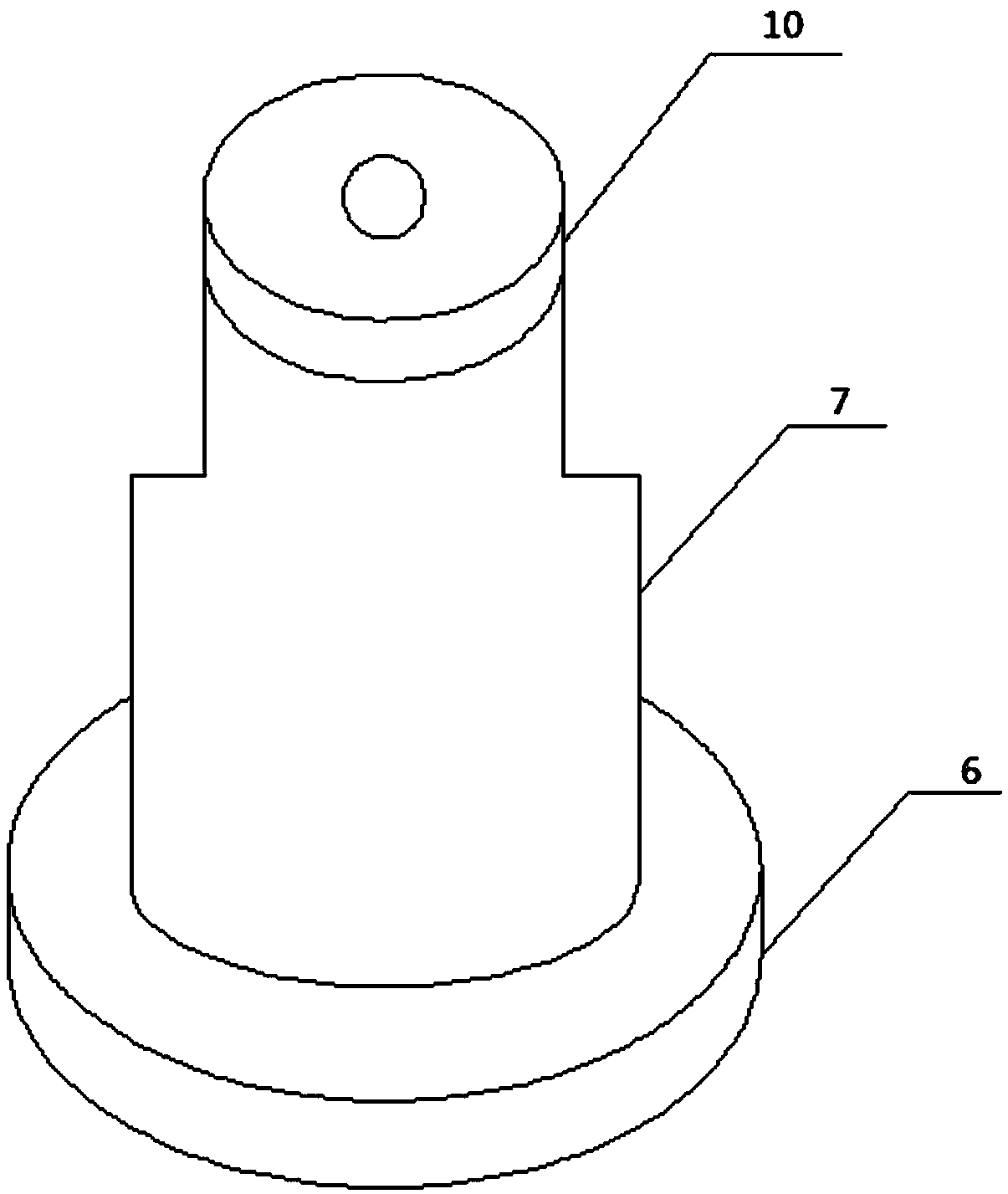
[0029] The retractable clamp is used to fix the robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More