Sweeping robot control method and system based on motion recognition and sweeping robot
A sweeping robot and motion recognition technology, applied in manual sweeping machinery, carpet cleaning, floor sweeping, etc., can solve the problems of not being able to temporarily clean a certain area, and the sweeping robot cannot meet the application requirements, etc., to achieve the effect of intelligence and convenience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 2
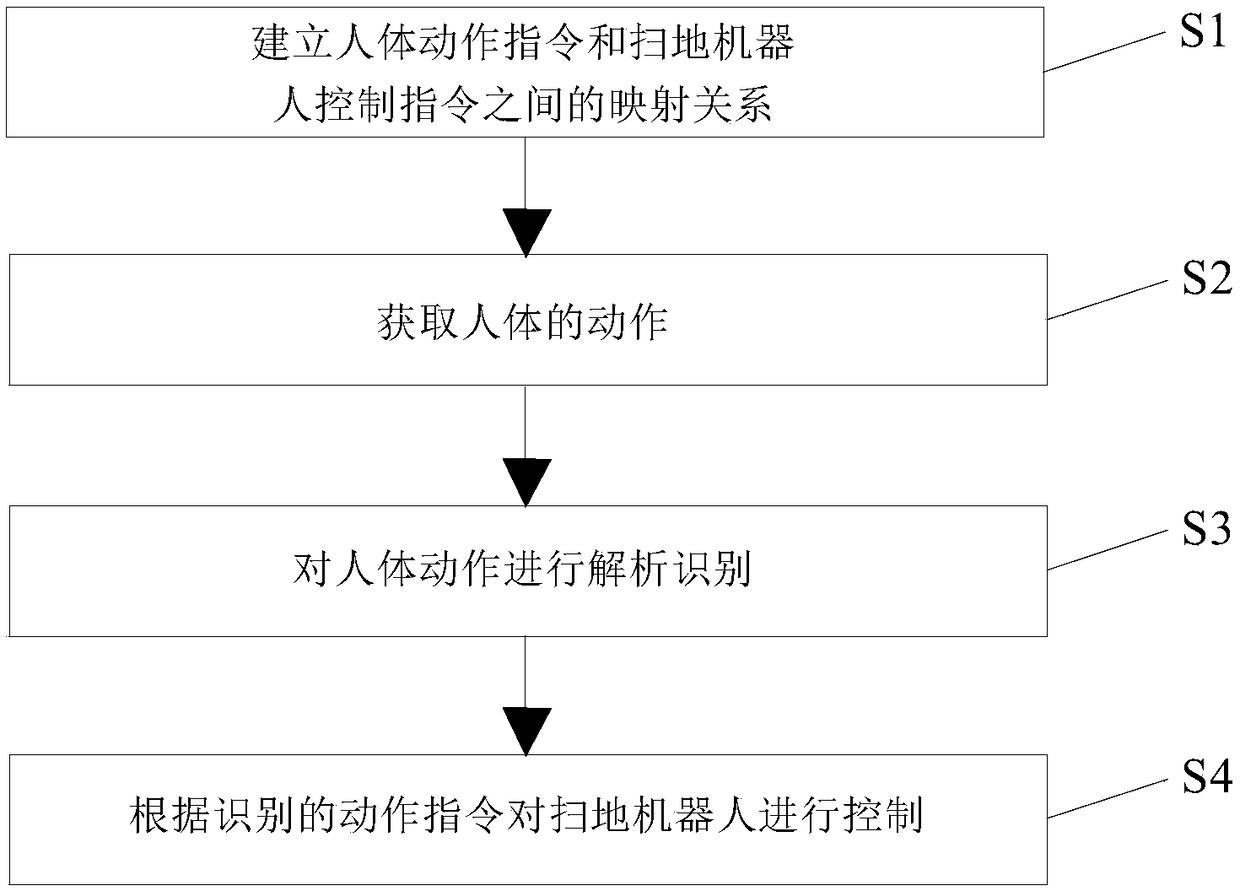
[0050] An action-recognition-based intelligent control method for a sweeping robot in this embodiment has the same steps S1, S2, and S3 as in Embodiment 1. The difference from Embodiment 1 is that step S4 in this embodiment includes
[0051] S4: Control the sweeping robot according to the recognized action command,
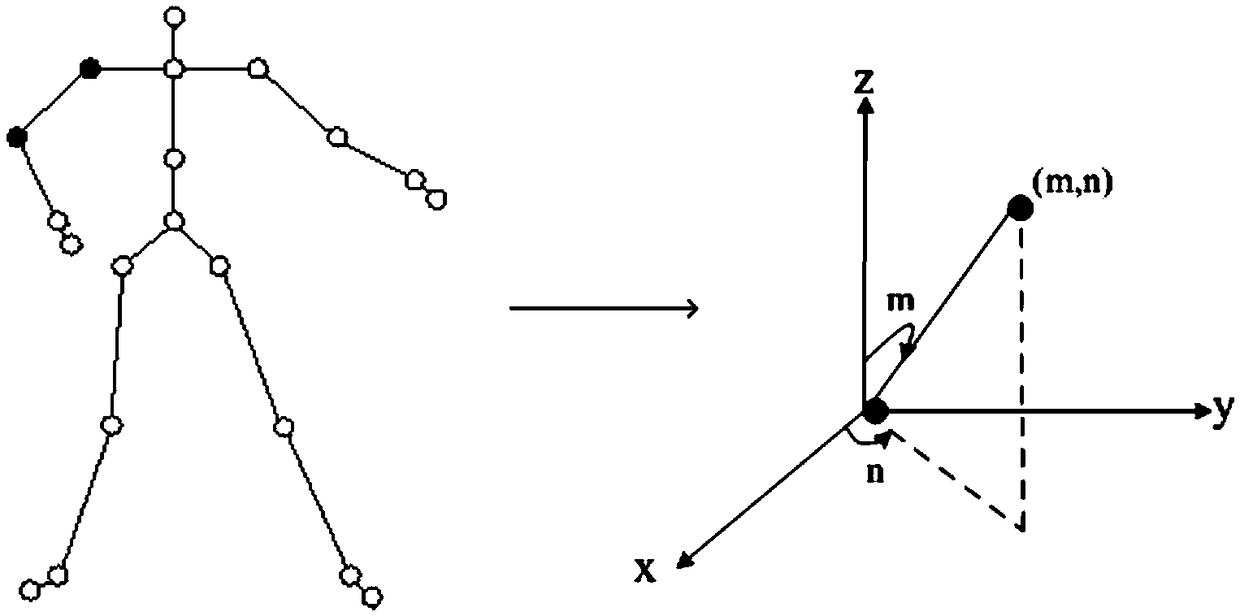
[0052] For example, the sweeping robot is controlled to move to the designated location for cleaning by pointing at the human body. When the human body activates the specific scene mode of the sweeping robot by waving, the human body specifies the specific area of the ground with the hand, and extracts the features of the obtained human skeleton data through Kinect human detection. According to the geometric structure of the human body skeleton and the ground and / or the relative position of the human body and the sweeping robot, the relative position of the pointed area and the sweeping robot is calculated, and the sweeping robot is controlled to clean the design...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com