

A Vision Slam Algorithm Using CNN Feature Detection in Full Cycle
A feature detection, full-cycle technology, applied in computing, computer parts, instruments, etc., can solve problems such as inability to build trajectories and maps, unreliable results, etc., achieve concise visual odometry, fully express image information, and improve accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings.
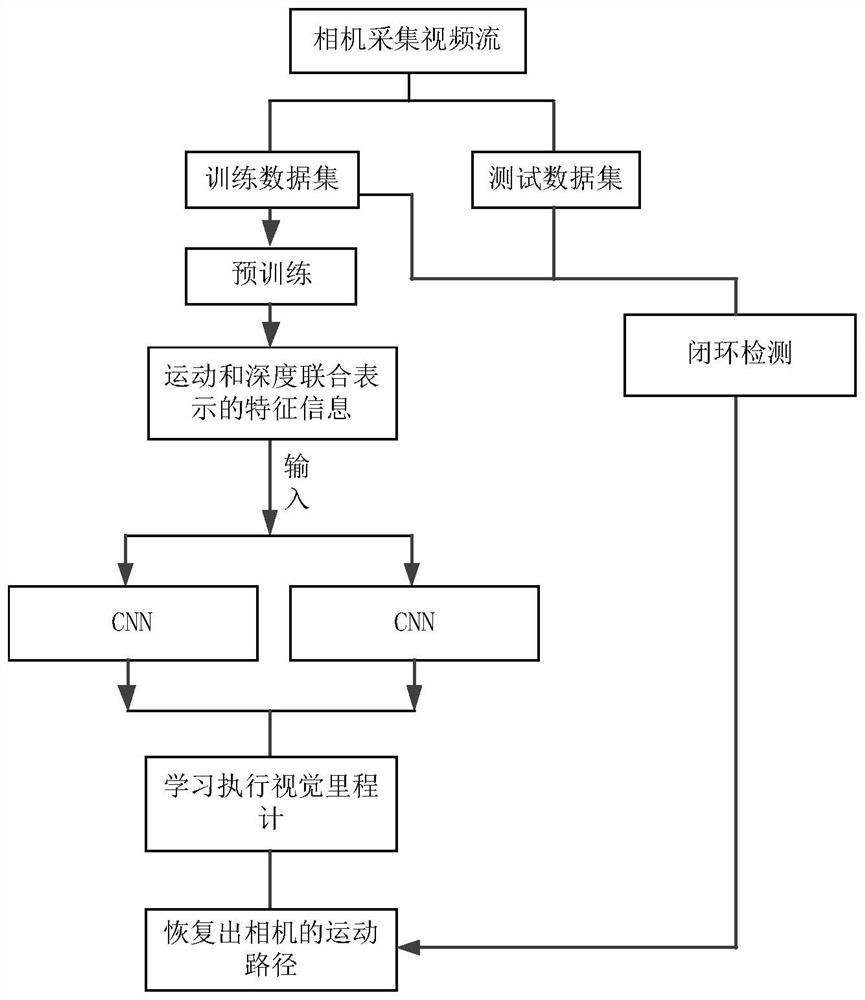
[0021] The present invention adopts the visual SLAM algorithm of CNNs feature detection in the whole cycle, such as figure 1 shown, including the following steps:
[0022] Step 1: Scan the surrounding environment information;
[0023] The binocular camera is used to move along the square area to collect the environmental image information of the real scene, and the obtained video stream is transmitted to the host computer in real time. The number of revolutions of the binocular camera is 1 to 2, forming a closed loop, which facilitates the compensation of the accumulated error in the subsequent closed-loop detection link. The above process is repeated, and a part of the multiple video streams collected is used as a training data set and a part is used as a test data set.
[0024] Step 2: Pre-training the training data set in the video stream collected in s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More