

A tire angle property detection method based on point cloud data
A technology of point cloud data and detection methods, applied in image data processing, instruments, calculations, etc., can solve problems such as tire scrap, wrong scraper selection in production lines, and no tire corner property detection, etc. The effect of saving labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
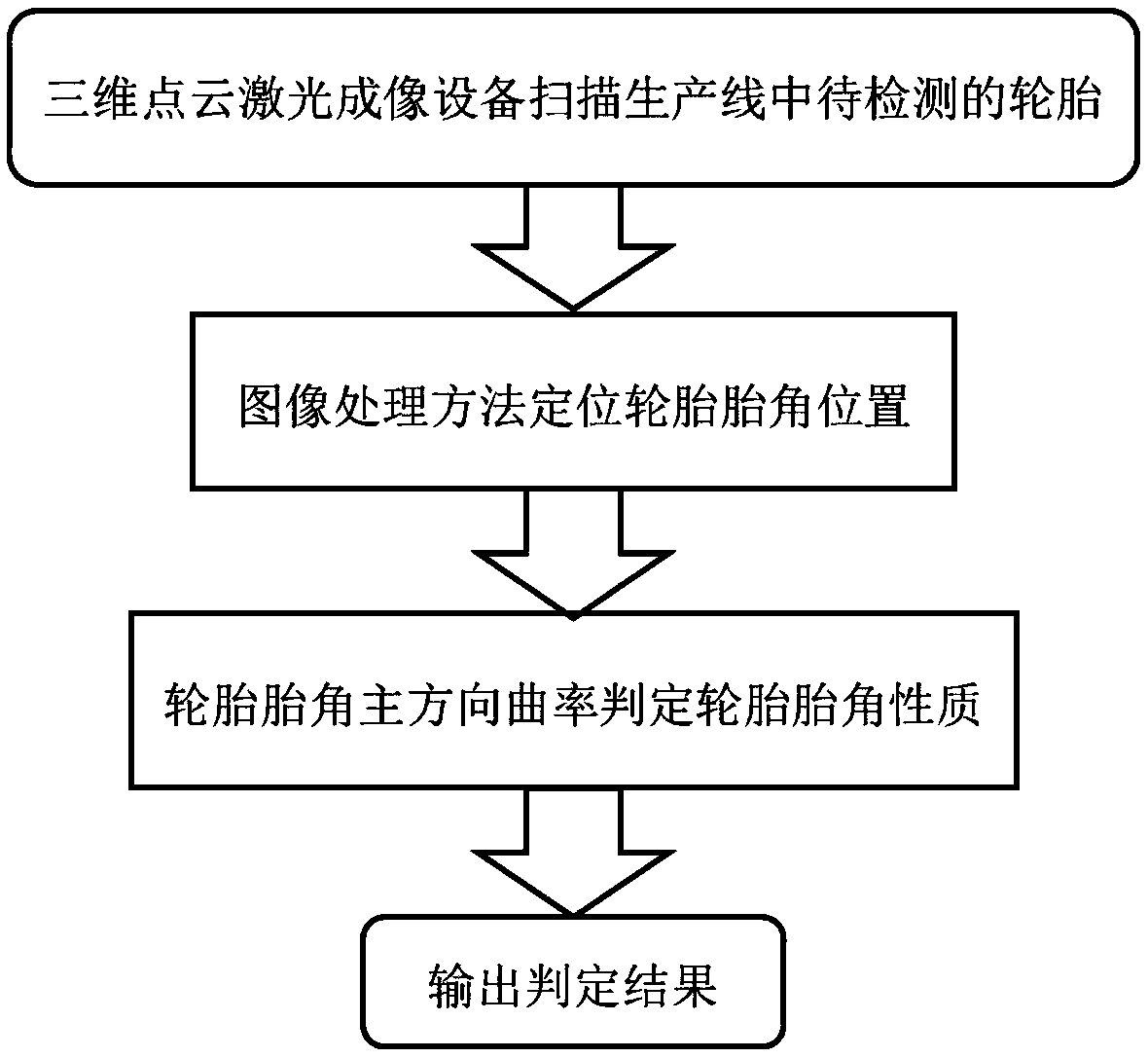
[0038] In order to accurately detect the properties of tire tire corners in the tire production line and improve production efficiency, this embodiment provides a method such as figure 1 A kind of tire tire corner property detection method based on point cloud data as shown, comprises the following steps:
[0039] Step 1), using a three-dimensional point cloud laser imaging device to scan the tire to be detected in the production line;
[0040] Step 2), according to the tire point cloud data of collection, position tire tire angle position by image processing method;
[0041] Step 3), according to the collected tire point cloud data, the property of the tire tire corner is determined by calculating the curvature of the main direction of the tire tire corner position.
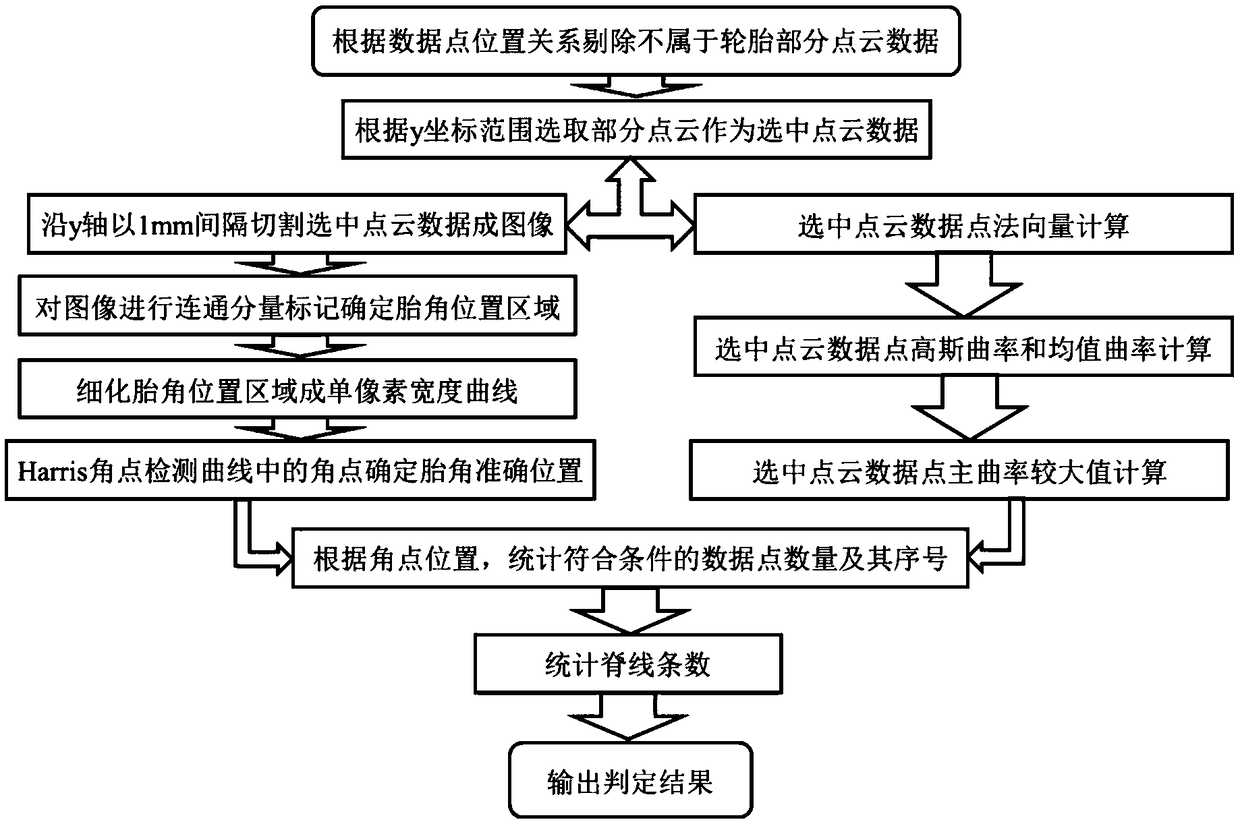
[0042] Step 2) described in the location of tire tire angle position by image processing method is carried out as follows:
[0043] (1) remove the point cloud data that does not belong to the tire part accordi...
Embodiment 2
[0060] In this embodiment, on the basis of Embodiment 1, the effects of the present invention are further described.
[0061] with the method of the present invention image 3 The sharp tire point cloud data in the processing:
[0062] In the first step, use the method in step 2) to select part of the point cloud data, according to Figure 4 The method slices the selected point cloud to obtain 41 pieces of image data;
[0063] In the second step, the method in step 2) is used to determine the tire tire angle position in each image, such as Figure 5 ;
[0064] The third step is to use the method in step 3) to calculate the normal vector of each data point in the selected point cloud, such as Figure 6 ;
[0065] The fourth step is to use the method in step 3) to calculate the larger value of the main direction curvature of the selected point cloud data point, and count the number of ridge lines according to the corner position, as shown in Figure 7 ;
[0066] In the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More