

Brain-like robot navigation method based on Bayesian multimodal perception fusion
A navigation method and robot technology, applied in navigation, surveying and navigation, navigation computing tools, etc., to achieve the effect of improving practicability and high biological fidelity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
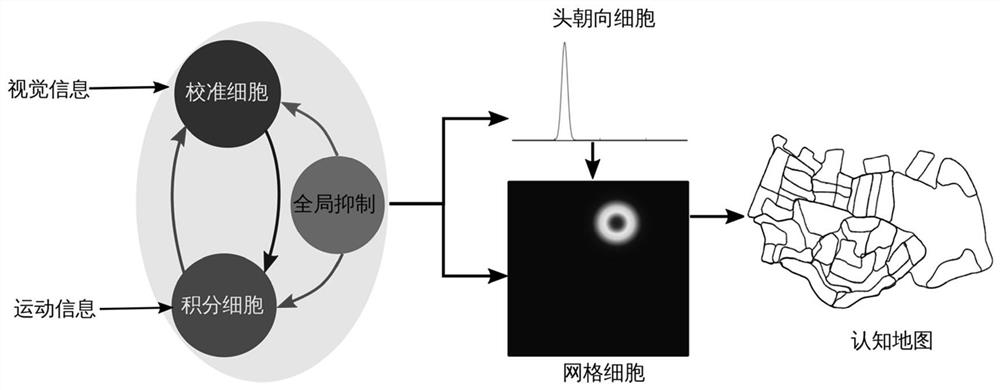
[0110] Step 3, calibrating cells for visual information fusion. After receiving the visual information, if the current information is different from the previously observed information, then a new topological network node is established, and capabilities are not injected into the head-oriented cell network and the grid cell network. If the current visual information is similar to the visual features seen at a certain time before and meets a certain threshold, then activate the relevant visual cells, inject energy into the grid cell network and head-to-head cell network, and the grid cells and The head-to-cell network is injected in a similar manner, thereby changing the magnitude of the reliability of the calibration cell probability distribution and the position of the mean. Calibration is implemented as follows:
[0111]
[0112]
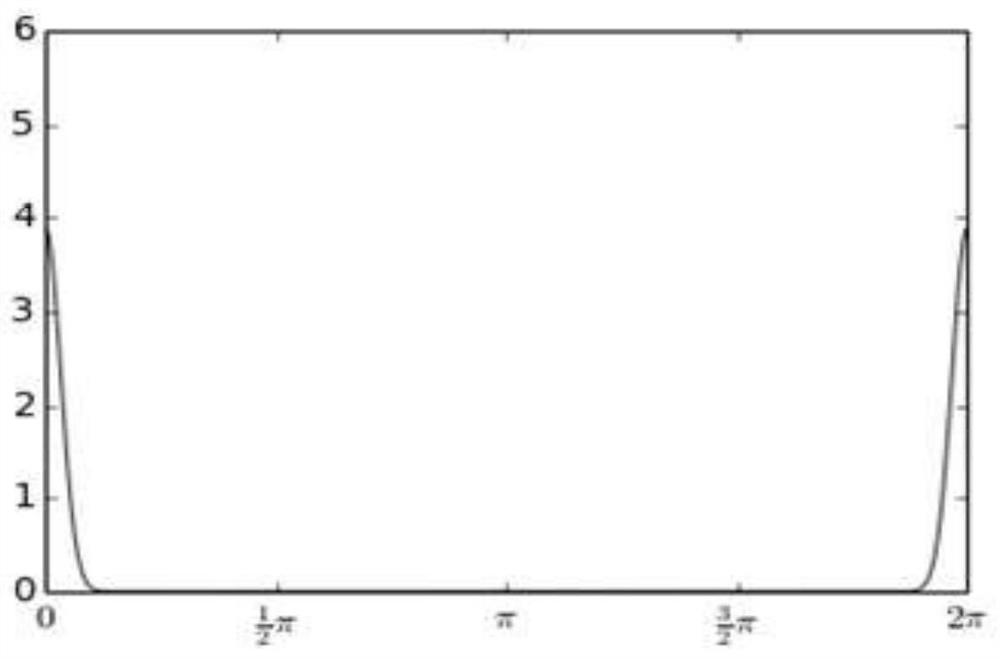
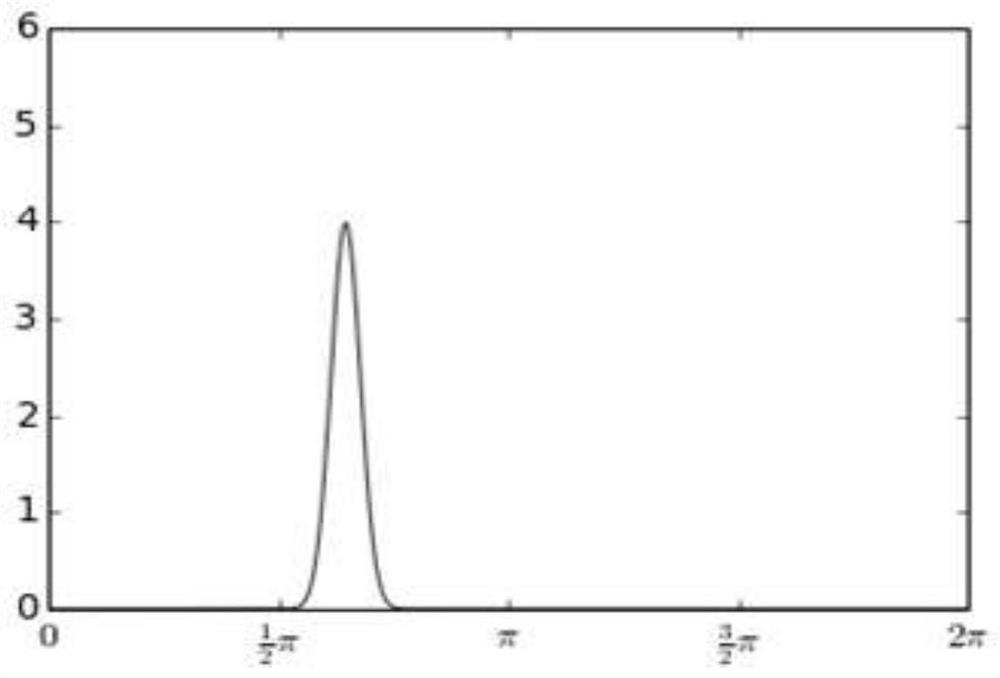
[0113] in, Indicates the strength of the injected energy, Indicates the location of injected energy on the one-dimensional head-orient...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More