

Panoramic auxiliary driving system and method for large truck
An assisted driving and panoramic technology, applied in the field of digital image processing, can solve the problems of insufficient early warning information, failure to detect truck obstacles, and inability to cover large trucks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
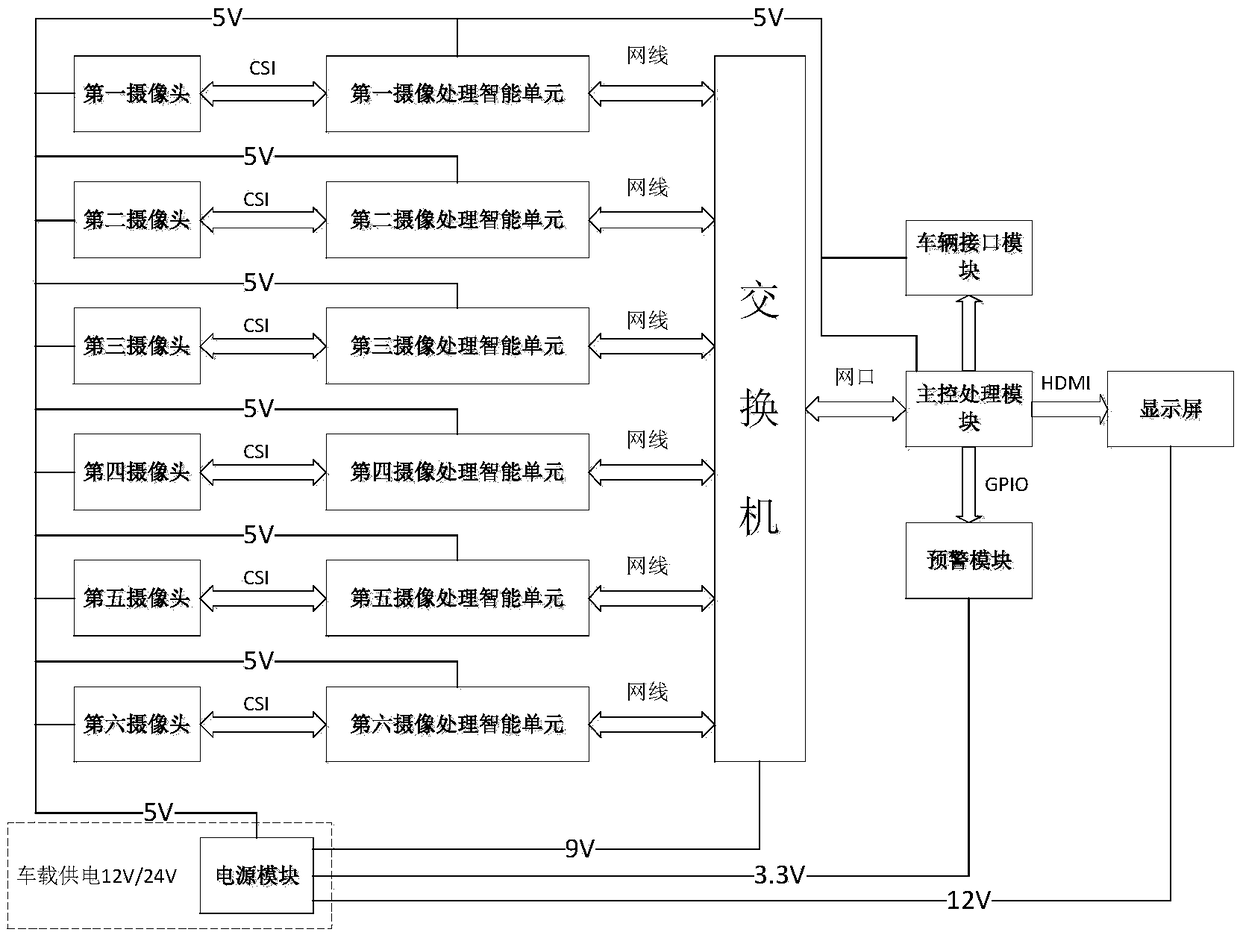
[0106] Combine below Figure 1 to Figure 6 Introduce the specific embodiment of the present invention, comprise the following steps:
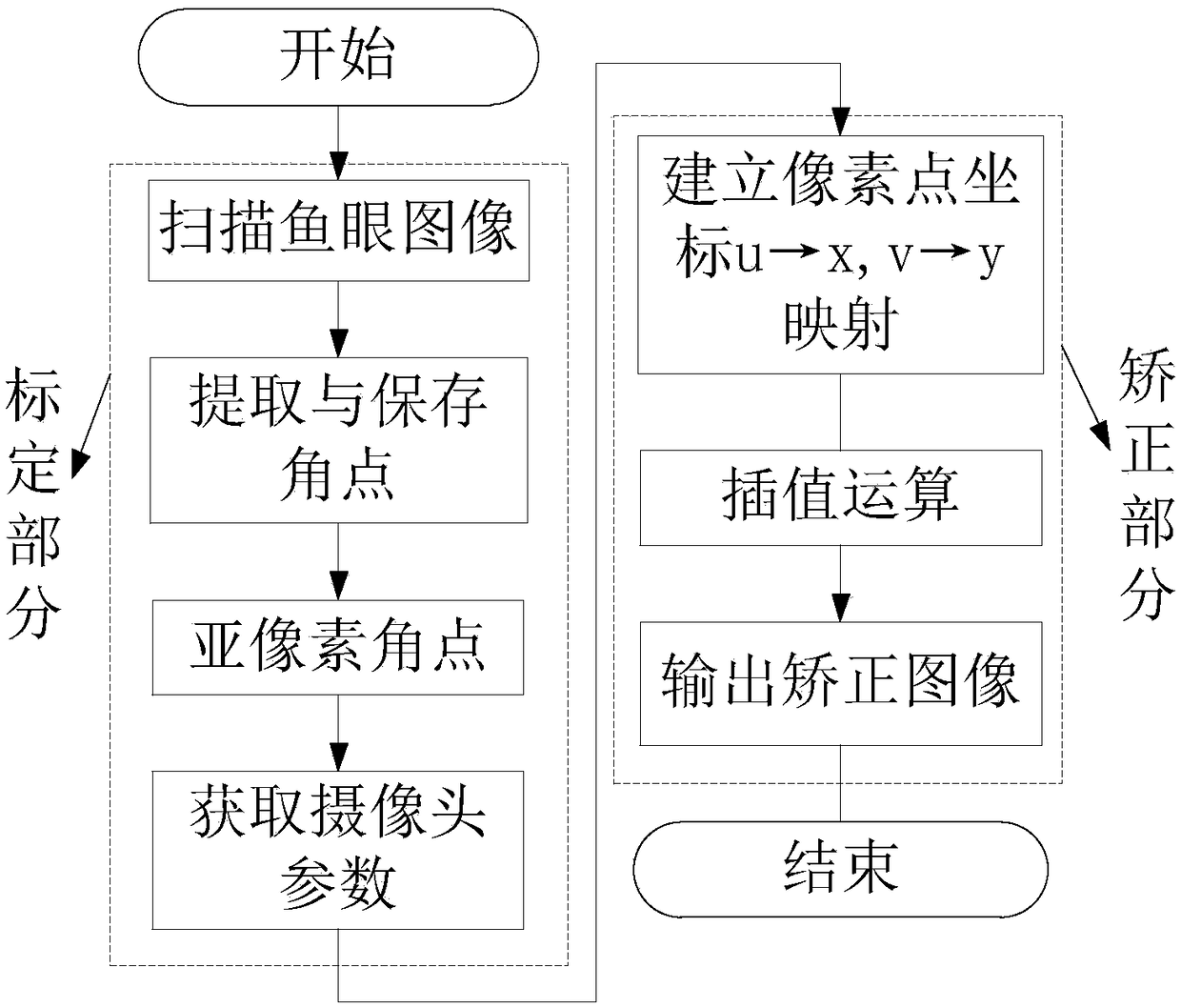
[0107] Step 1: Perform image acquisition and calibration through the first camera to the sixth camera respectively, obtain the internal parameters and external parameters of each camera, and correct the images collected by the first camera to the sixth camera through the internal parameters and external parameters, and establish Acquired images and corrected image mapping models;
[0108] The calibration is:
[0109] Point the installed six cameras at a W×H checkerboard to shoot, and rotate the checkerboard for a circle through a fixed rotation center to collect six groups of m checkerboard images in each group. The collected images are:
[0110] I i,j (x i,j ,y i,j )(1≤i≤6,1≤j≤L,1≤x i,j ≤U,1≤y i,j ≤V)
[0111] Among them, I i,j is the image captured by the i-th camera for the j-th time, during the entire rotation of the checkerboard, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More