

RRT (rapidly-exploring random tree) route optimizing method of unmanned aerial vehicle based on greedy algorithm
A greedy algorithm and path optimization technology, applied in the direction of navigation calculation tools, etc., can solve the problems of wasting time, increasing planning time, reducing effective time and speed, etc., to achieve the effect of optimizing the curvature of the polyline, reducing the way points, and shortening the path.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
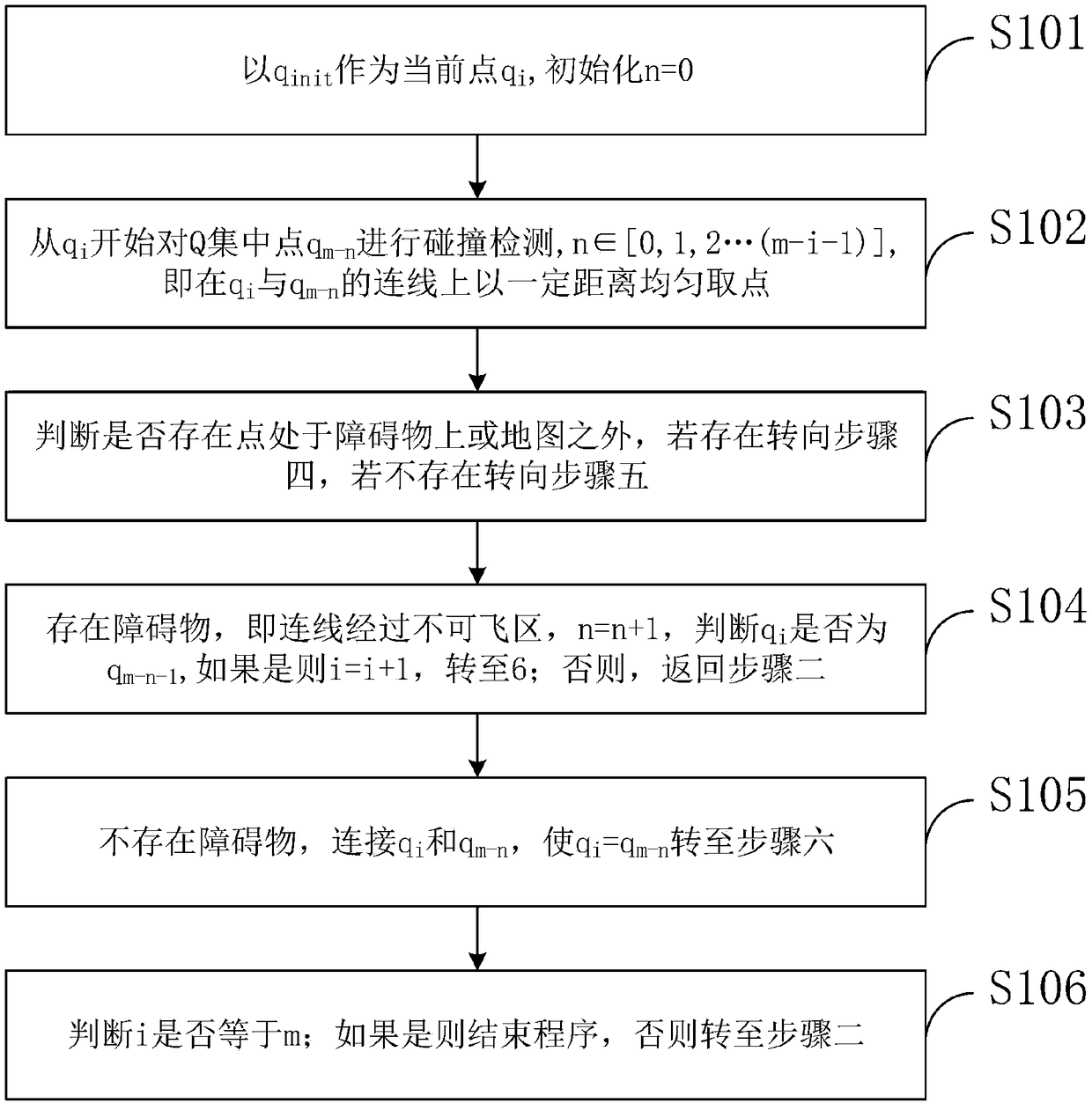
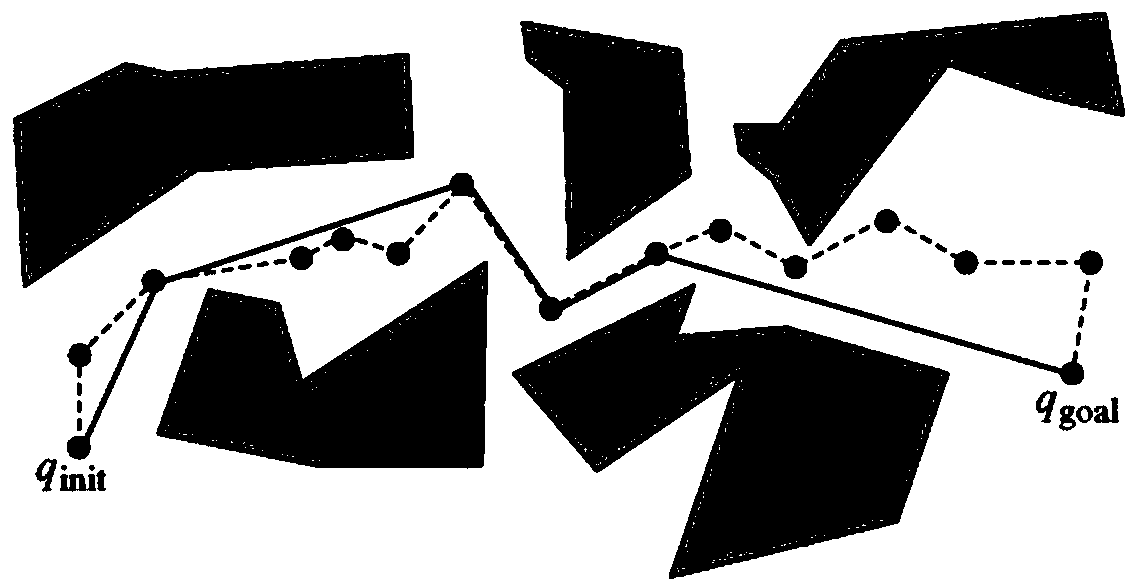
[0043] In order to make the generated path shorter and less turning, a smoothing algorithm should be added, and the smoothing algorithm used here is a greedy algorithm. The greedy algorithm means that when solving a problem, it always makes the best choice for the current situation, and does not consider the global optimum, but achieves a local optimal solution in a certain sense. In path smoothing, the strategy of the greedy algorithm is to obtain a feasible path with the optimal distance as much as possible on the obtained path.
[0044] The greedy algorithm path smoothing process provided by the embodiment of the presen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More