

A hand-eye calibration method of robotic arm based on spatial distance and epipolar constraints
A space distance, hand-eye calibration technology, applied in the field of visual calibration, can solve the problems of lack of constraint information, constraint information fusion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below with reference to the drawings and embodiments.
[0073] The embodiment of the present invention and its implementation process are as follows:
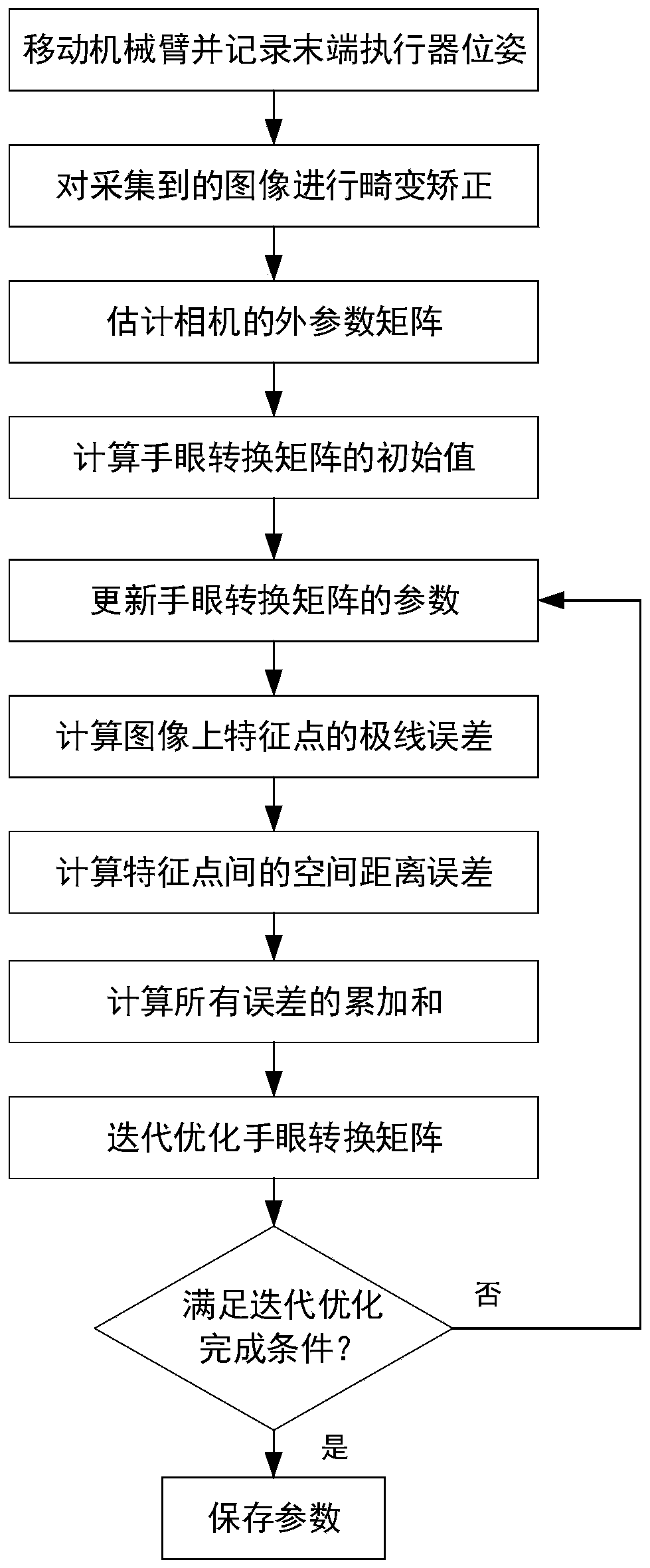
[0074] (1) figure 1 It is a flowchart of the method of the present invention. The robot arm model in this experiment is ABB-IRB-120, the industrial camera model is Basler-acA2440-20gm, and the lens model is Computar-M1224-MPW2.
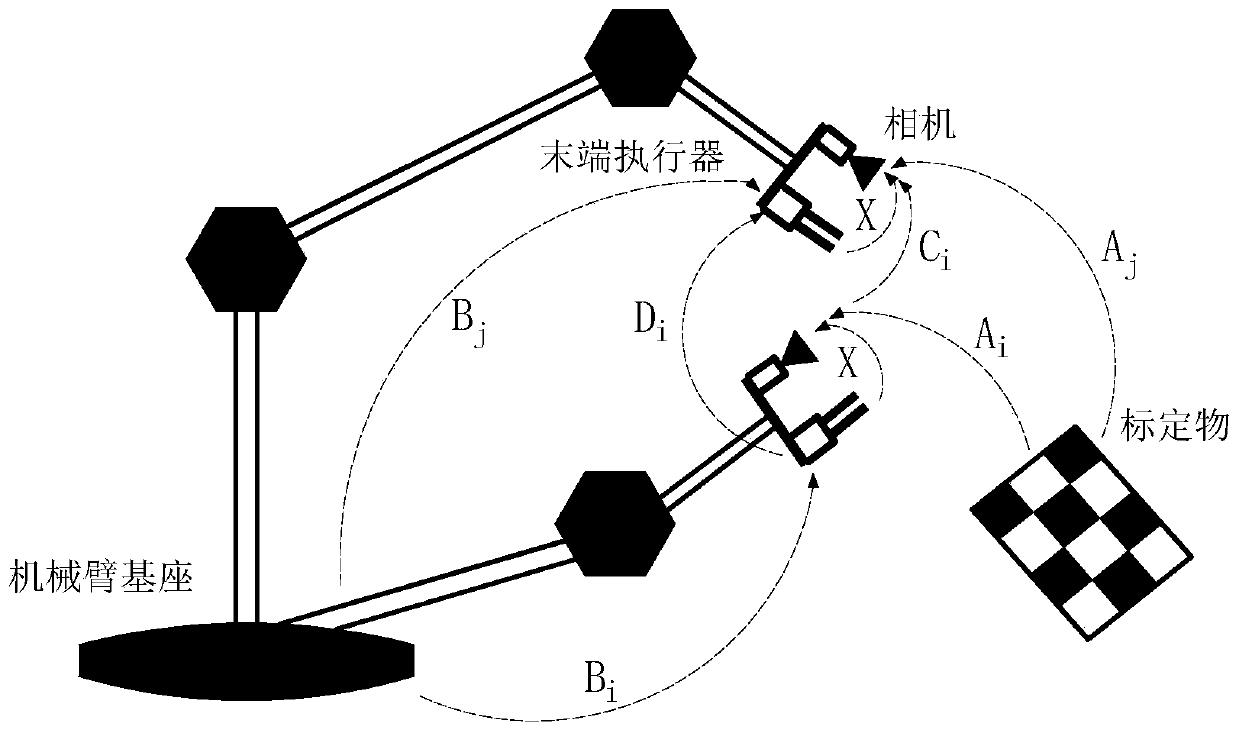
[0075] Such as figure 2 As shown, the robotic arm includes a robotic arm base and an end effector. The end effector is installed on the robotic arm base. The end effector is equipped with a camera. The robotic arm is located above the calibration board. The surface of the calibration board has a chess black and white checkerboard pattern. The end effector moves the camera to take a complete image of the calibration board;
[0076] Use Zhang Zhengyou's calibration method to calibrate the camera fixed on the end effector of the robotic arm to obtain the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More