Multifunctional exoskeleton robot capable of being transformed into wheelchair
An exoskeleton robot and multi-functional technology, applied in the field of exoskeleton, can solve the problems of people with inconvenient mobility, such as difficulty in wearing and walking, single structure, inability to flexibly disassemble and deform control, etc. Effects, effects with a simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
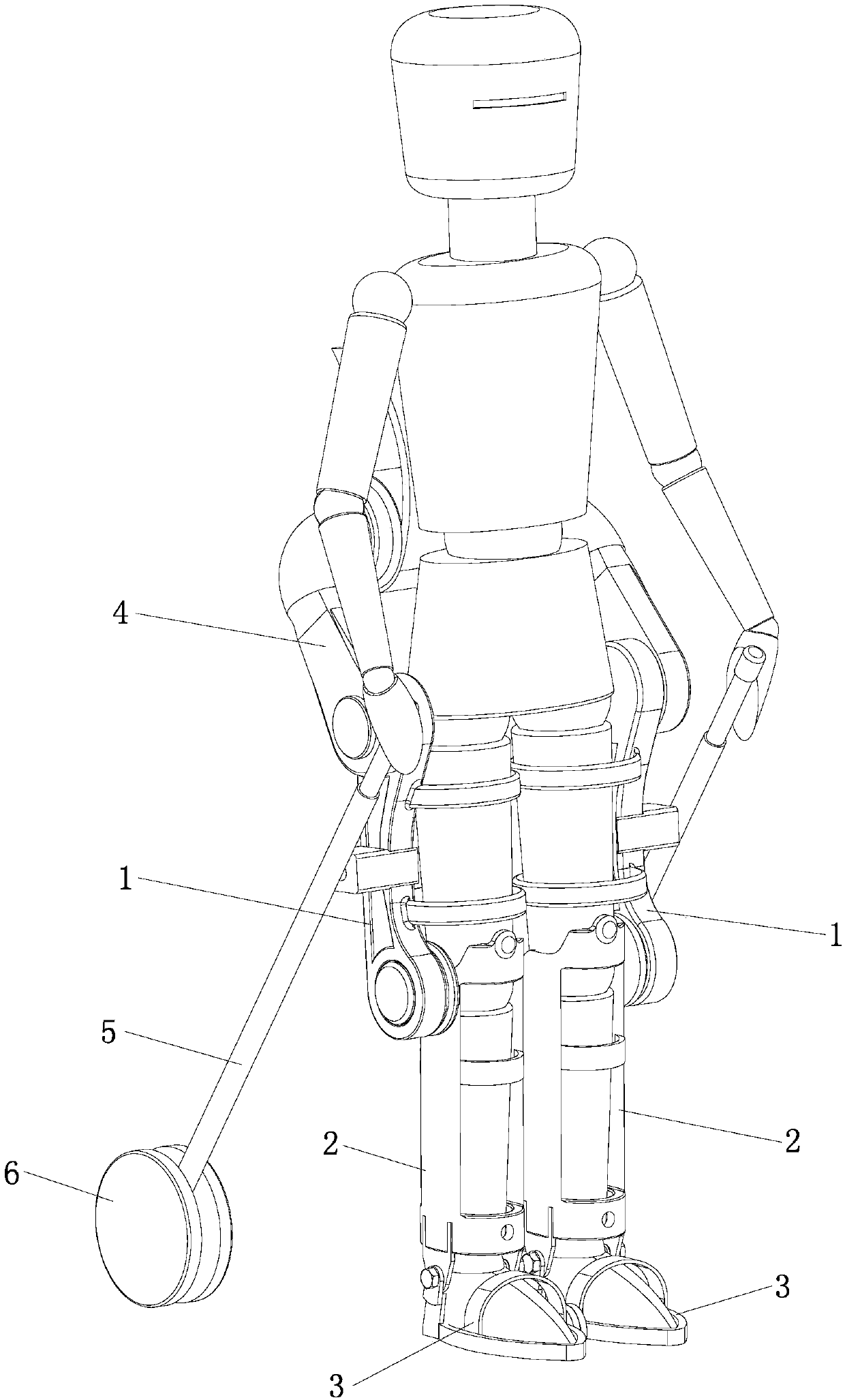
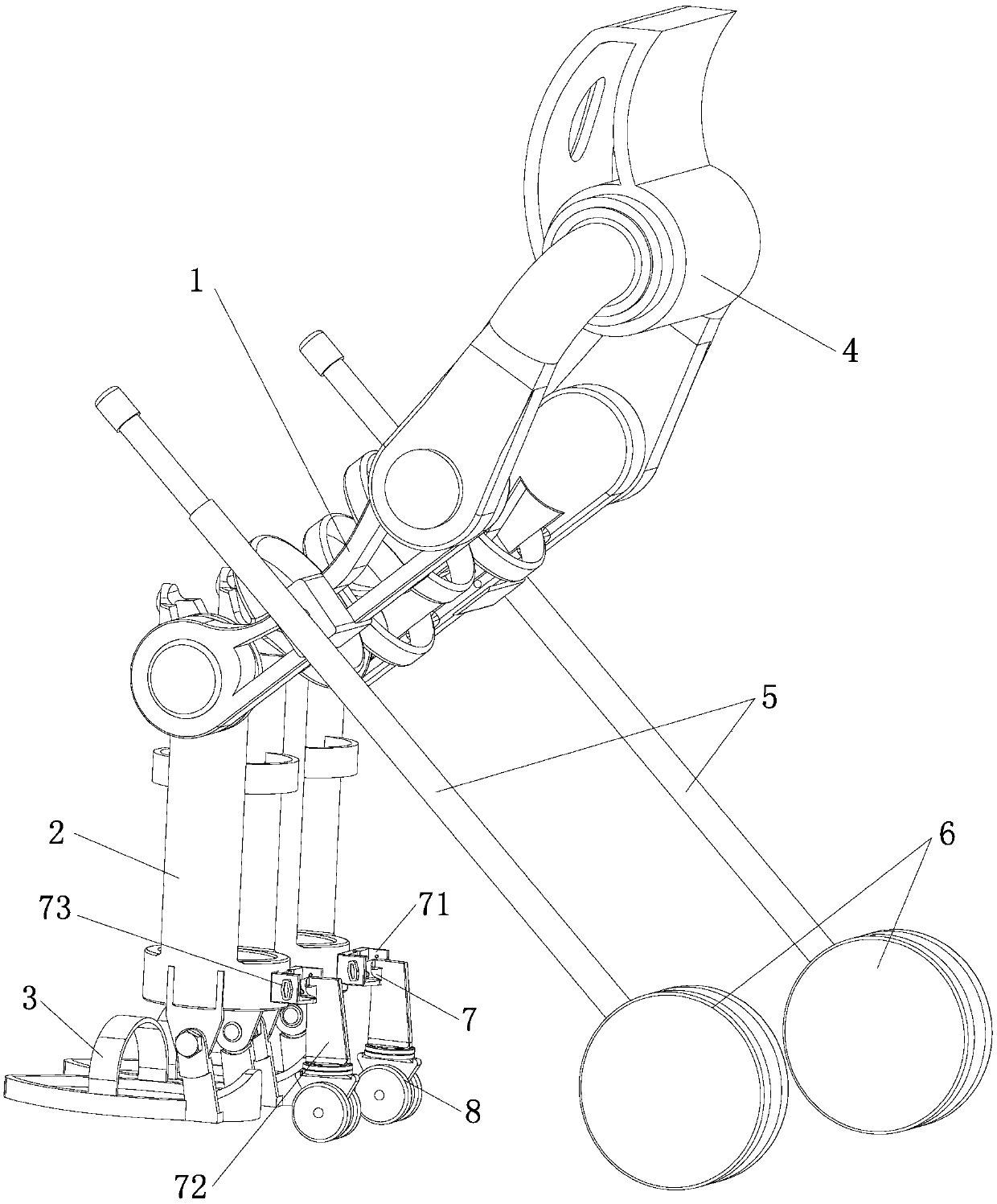
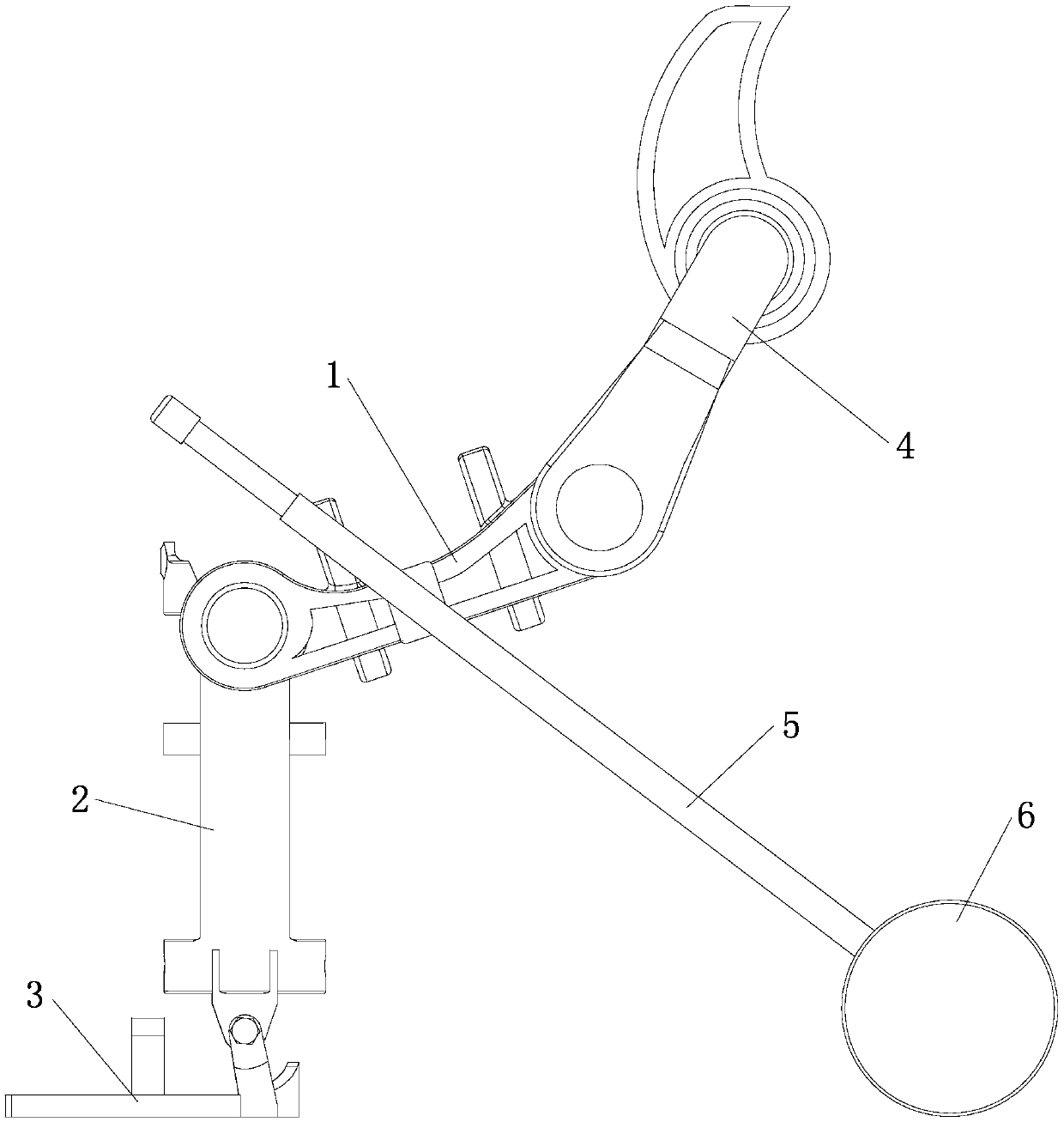
[0021] see Figure 1-Figure 4 Explain that the multifunctional exoskeleton robot that can be transformed into a wheelchair in this embodiment includes a left leg, a right leg, a foot 3 and a support frame 4;
[0022] The left leg and the right leg include a thigh 1 and a calf 2 respectively, the upper part of the thigh 1 is equipped with a hip joint drive motor, and the output shaft of the hip joint drive motor is connected to the support frame 4; the upper part of the calf 2 is equipped with a knee joint motor, and the knee joint motor The output shaft is connected to the lower part of the thigh 1, the bottom of the calf 2 is equipped with a foot 3, and the thigh 1 is also provided with a detachable hand lever 5, which is arranged on the thigh 1 and rotates relative to the thigh 1, and the end of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com