

Hole punching robot with point self-finding function
A robotic and functional technology, applied in the direction of manufacturing tools, drilling equipment and methods, automatic control systems for drilling, etc., can solve the problems of laborious drilling, high labor consumption, endangering workers' health, etc., to avoid operations and reduce dust. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to better understand the present invention, the implementation manner of the present invention will be explained in detail below in conjunction with the accompanying drawings.
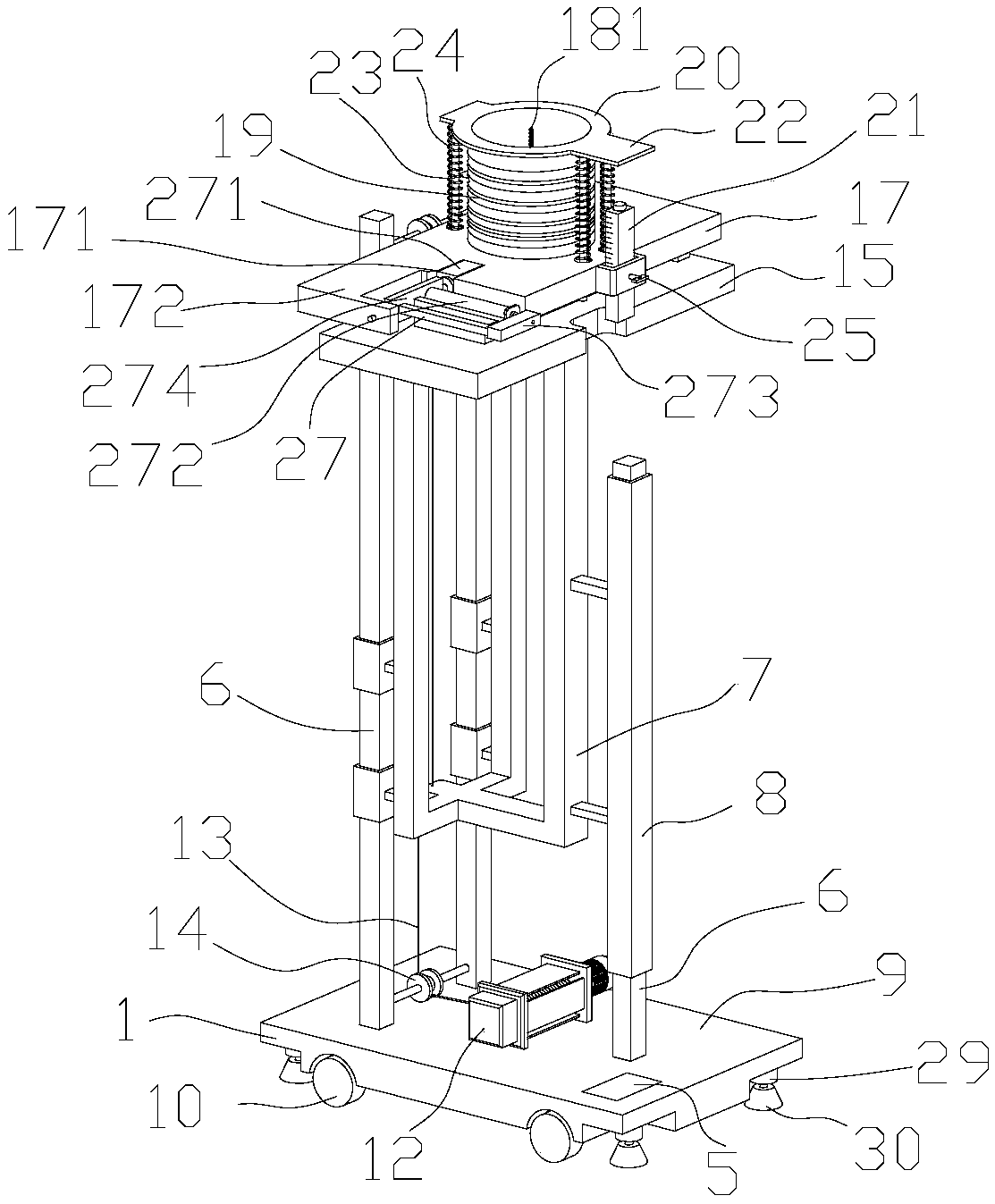
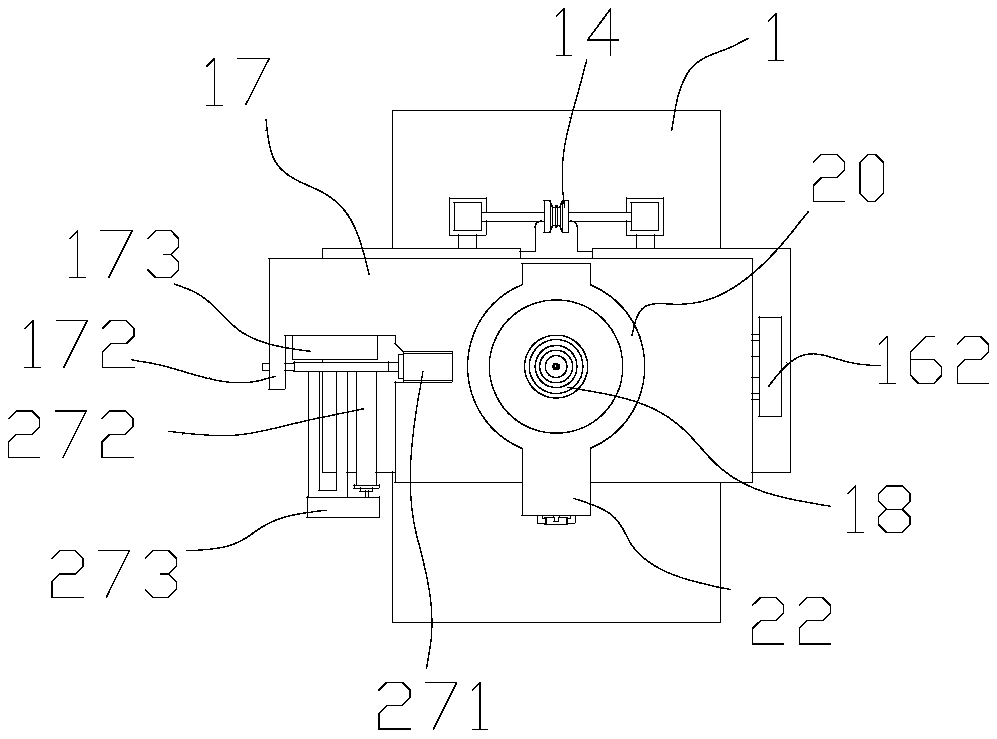
[0031] as attached figure 1 to attach Figure 12 As shown, the present invention mainly includes a tracking vehicle 1, a lifting bracket 2, a support panel 3, a punching mechanism 4 and a controller 5, and the lifting bracket 2 mainly includes a fixed frame 6 and a lifting frame 7, and the fixed frame 6 is set On the tracking vehicle 1, the lifting frame 7 is movably arranged on the outside of the fixed frame 6 through the sleeve 8, the support panel 3 is arranged on the upper end of the lifting frame 7, and the punching mechanism 4 is arranged on the On the support panel 3 , the controller 5 is arranged on the tracking vehicle 1 .
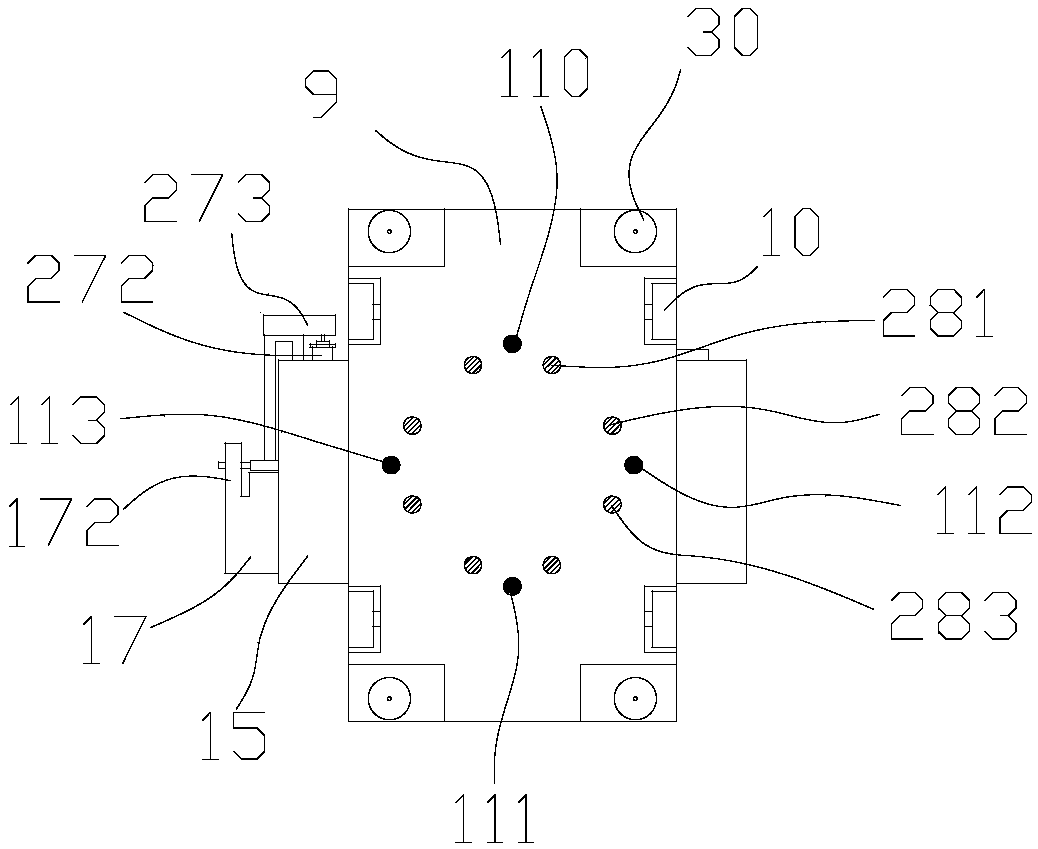
[0032] Described tracking car 1 mainly comprises car body 9, wheel 10, tracking sensor 11 and power module, and described tracking sensor 11 has four and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More