

A Geofencing Algorithm for Autonomous Flying UAVs
A geo-fencing and UAV technology, applied in the directions of instruments, three-dimensional position/channel control, control/adjustment systems, etc., can solve the problems of UAV inclusion, and achieve the effect of avoiding cross-border and ensuring flight safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
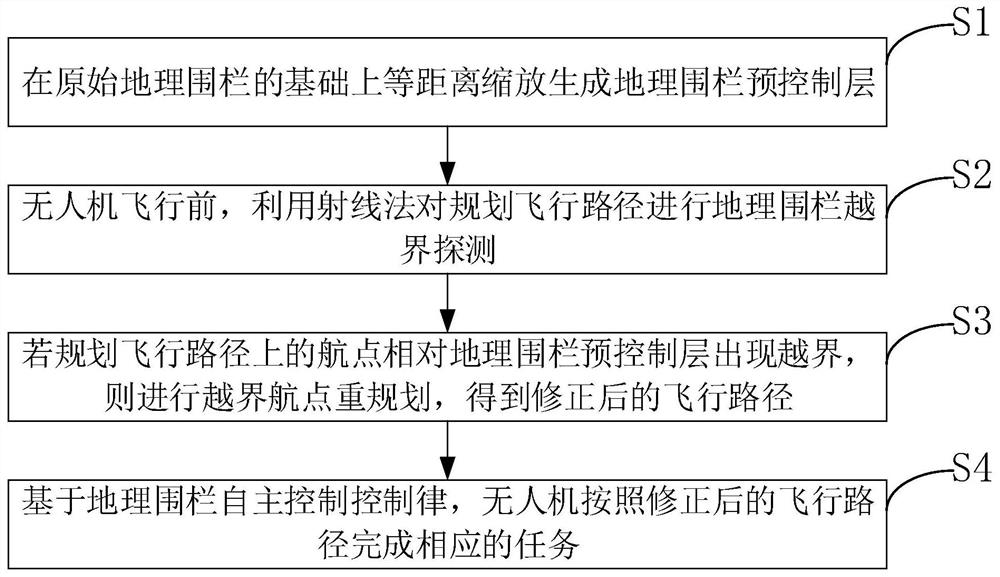
[0059] The present invention provides an autonomously flying unmanned aerial vehicle geofencing algorithm, comprising:
[0060] Step 1. Generate a geofence pre-control layer:
[0061] 1. Geofence scaling algorithm
[0062] The specific steps of the equidistant scaling algorithm are as follows:
[0063] Step 1. Set zoom distance δ b , to obtain the geofence vertex set g=(p 1 ,...,p n )=[(x 1 ,y 1 ),(x 2 ,y 2 ),...,(x n ,y n )], scaling the geofence to initialize:
[0064] g'=g (1)
[0065] Step 2. Calculate the slope of each side of the geofence:
[0066]
[0067] Intercept on sides:
[0068] b i =y i -x i *m i (3)
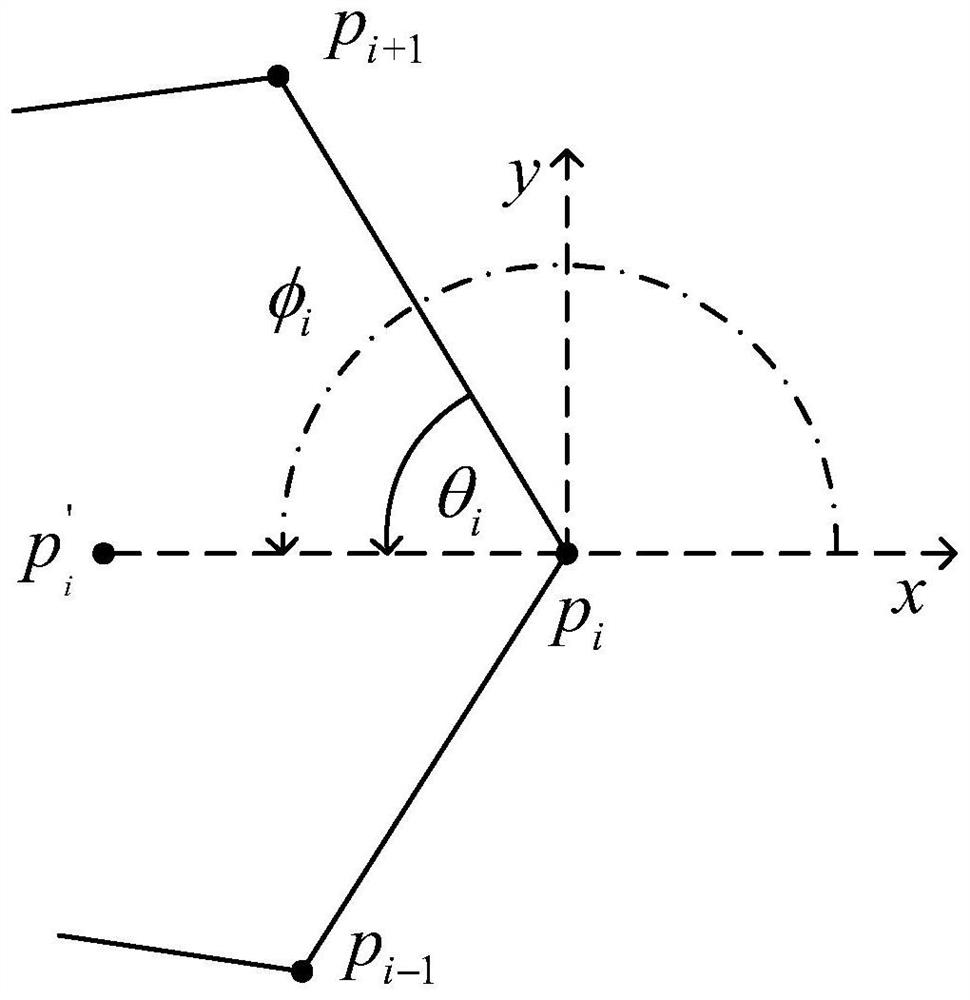
[0069] and the half-angle size θ of each interior angle i ;
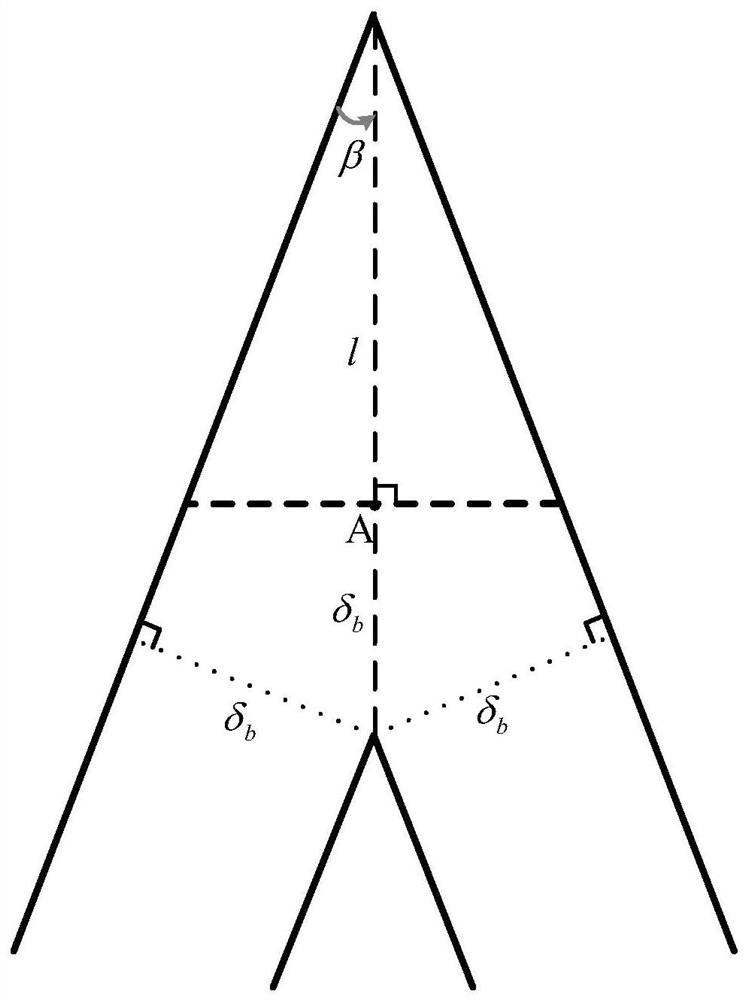
[0070] Step 3, if figure 2 As shown, the calculation makes the distance between the old and new sides after scaling be δ b Distances on the bisectors of the angles of :
[0071]
[0072] will θ i Transform to the global coordinate system:
[0073]
[0074] Step 4 if δ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More