Method, device and robot for indoor cleaning planning
A robot and planning technology, applied in the field of robotics, can solve the problems of missed sweeping and repeated cleaning, affecting the efficiency of cleaning, etc., and achieve the effect of reducing the path of repeated cleaning, enhancing ease of use and practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
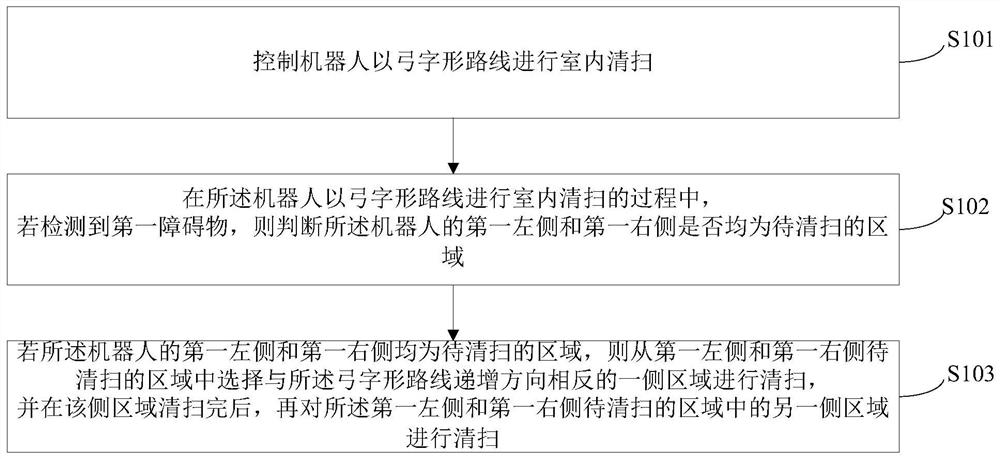
[0035] figure 1 It is a schematic flowchart of the method for indoor cleaning planning provided by Embodiment 1 of the present invention, and the method may include the following steps:
[0036] S101: Control the robot to clean the room in a bow-shaped route.
[0037] Wherein, the robot mainly refers to a sweeping robot, also known as a cleaning robot, an automatic sweeper, an intelligent vacuum cleaner, etc., which is a kind of intelligent household appliances, and can automatically complete the cleaning of the floor in the room by virtue of certain artificial intelligence; the room The area to be cleaned can be one room or multiple rooms, and the shapes of the rooms can be different. The above-mentioned rooms can be any one or more of bedrooms, utility rooms, study rooms, kitchens, and toilets.
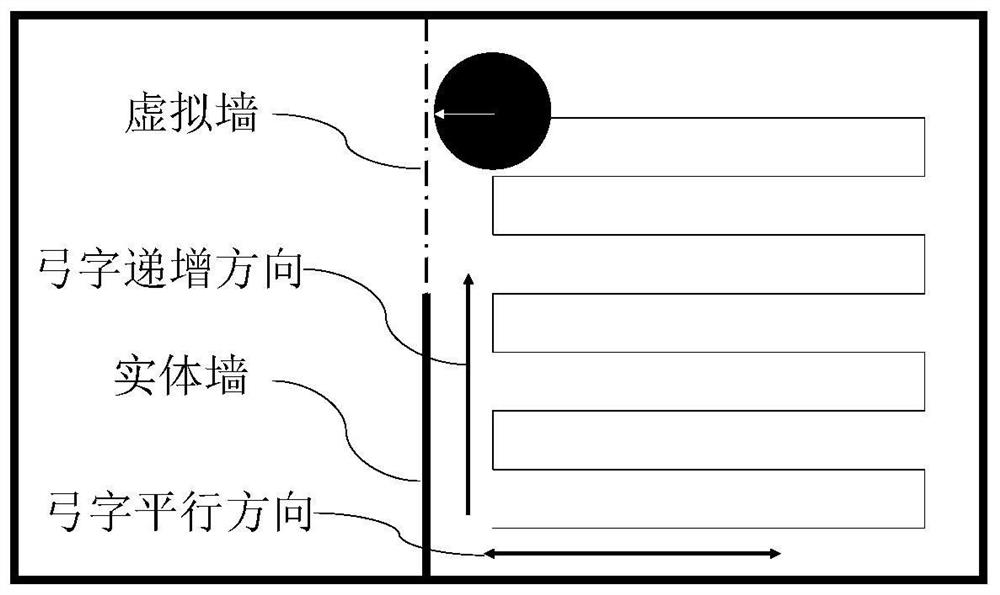
[0038] In one embodiment, the bow-shaped route is a bow-shaped route. Wherein, the distance between two adjacent cleaning trajectories in the bow-shaped route is relatively large,...
Embodiment 2
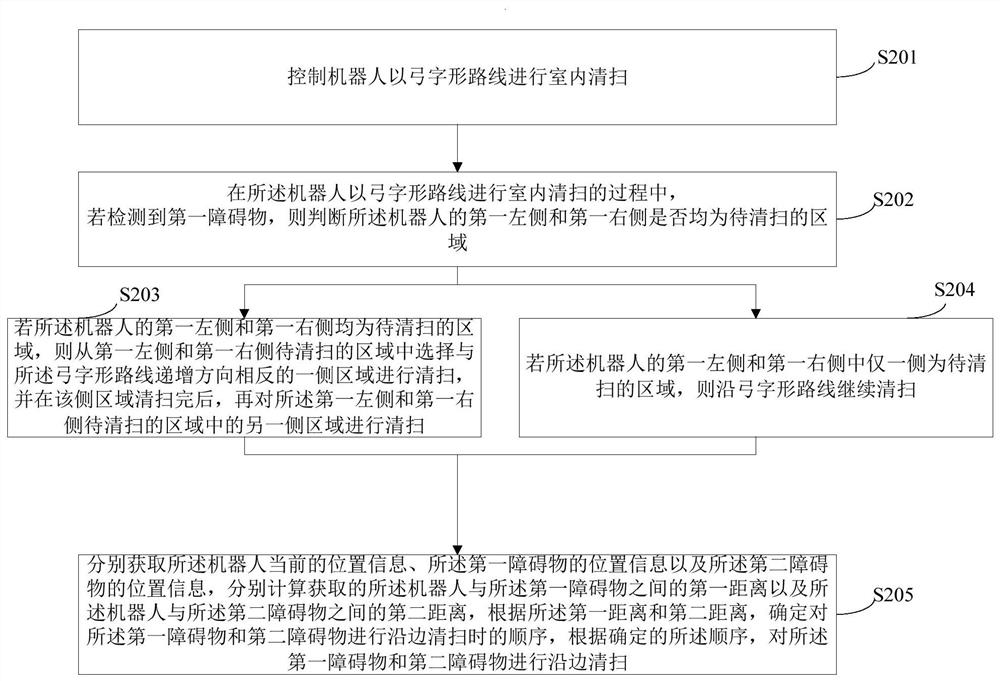
[0050] Figure 2-a The flow diagram of the method for indoor cleaning planning provided by Embodiment 2 of the present invention is a further refinement and description of step S103 in Embodiment 1 above. The method may include the following steps:
[0051] S201: Control the robot to clean the room in a bow-shaped route.
[0052] S202: When the robot cleans the room in a bow-shaped route, if a first obstacle is detected, determine whether the first left side and the first right side of the robot are areas to be cleaned.
[0053] Wherein, the above steps S201-S202 are the same as the steps S101-S102 in the first embodiment, and the specific implementation process can refer to the description of the steps S101-S102, which will not be repeated here.
[0054] It should be noted that, after the above step S202 is executed, if the judgment result is "yes", continue to execute step S203; if the judgment result is "no", continue to execute step S204.
[0055] S203: If both the first...
Embodiment 3
[0075] image 3 It is a schematic structural diagram of the device for indoor cleaning planning provided by Embodiment 3 of the present invention. For convenience of description, only the parts related to the embodiment of the present invention are shown.
[0076] The device for indoor cleaning planning may be a software unit, a hardware unit, or a combination of software and hardware built into the robot, or it may be integrated into the robot as an independent pendant.
[0077] The device for indoor cleaning planning includes:
[0078] The control module 31 is used to control the robot to perform indoor cleaning with a bow-shaped route;
[0079] The judging module 32 is configured to judge whether the first left side and the first right side of the robot are both to be cleaned if a first obstacle is detected during the indoor cleaning process of the robot in a bow-shaped route. area;
[0080] The first cleaning module 33 is used to select the robot from the areas to be cl...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap