

Automatic parking robot group task scheduling method
A task scheduling and automatic parking technology, which is applied to instruments, data processing applications, forecasting, etc., to achieve the effect of reducing operating costs and improving computing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
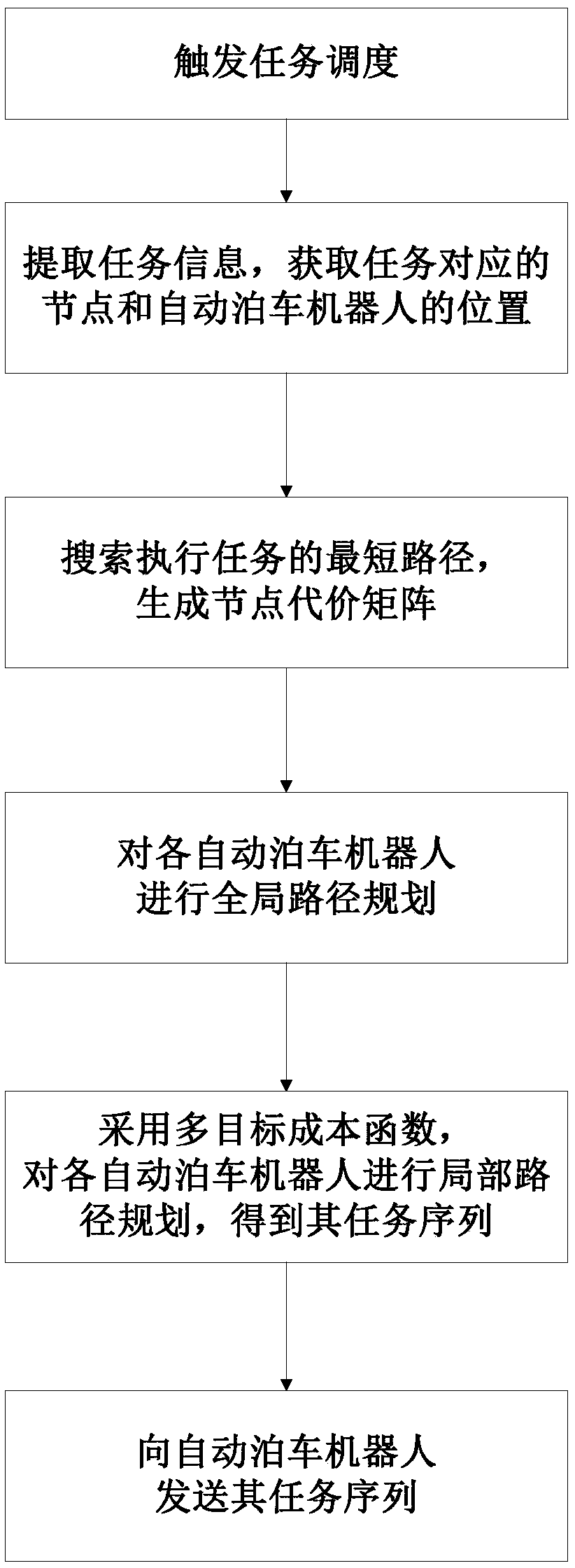
[0025] The present invention proposes a group task scheduling method for automatic parking robots, which can perform group robot task scheduling for the automatic parking system according to real-time operation information, to ensure that the waiting cost of customers' vehicles and the investment cost of parking robots are optimal, and the maximum Utilize parking robot resources to optimize operating costs. The automatic parking robot group task scheduling method comprises the following steps:
[0026] (1) Trigger task scheduling through periodic triggering and event triggering in parallel;
[0027] Wherein, periodic triggering refers to triggering task scheduling every time a set periodic time passes, for example, one minute is used as the triggering period. The priority of event triggering is higher than that of periodic triggering. Event t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More